运载机器人的设计(论文+CAD图纸)
内容
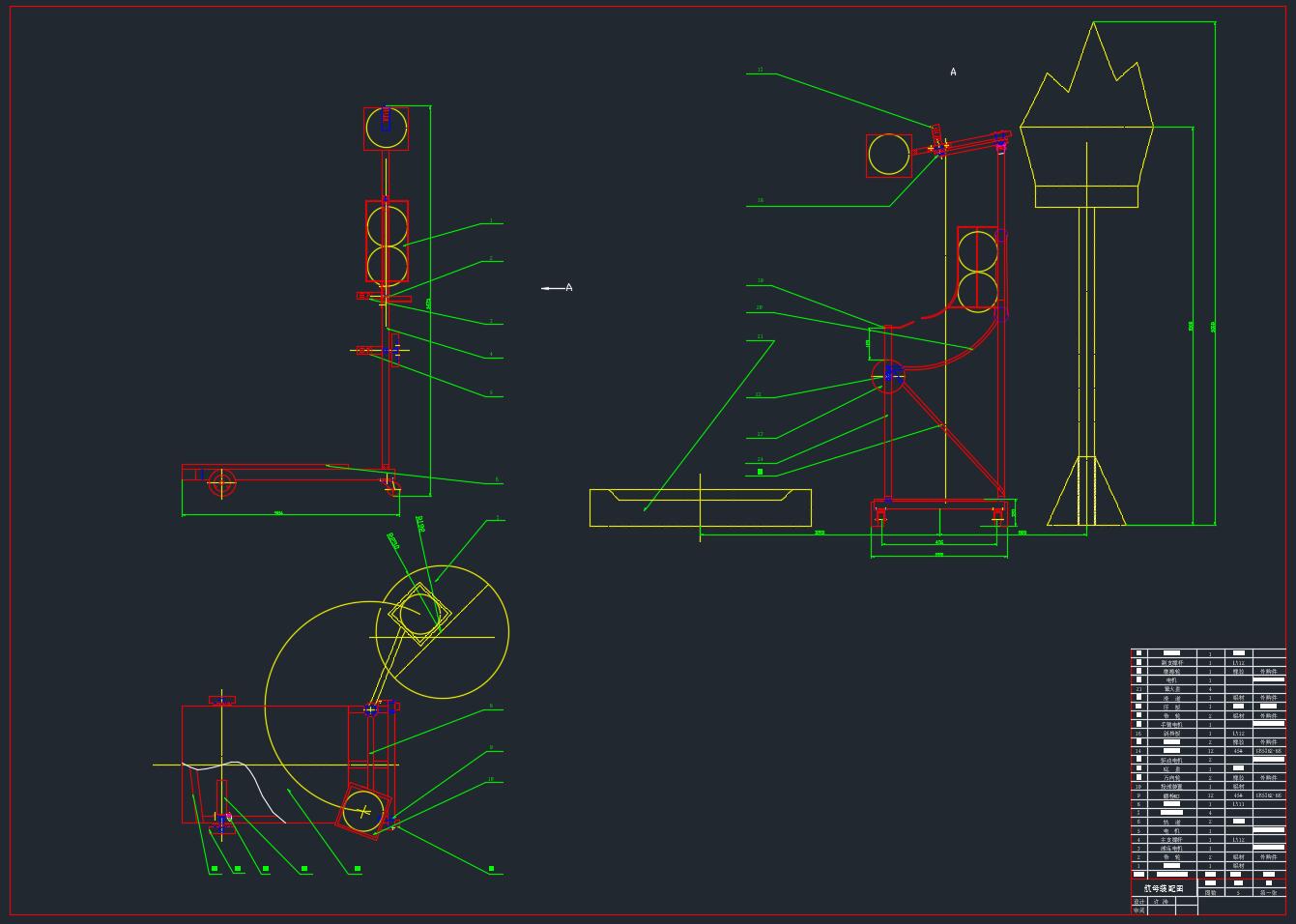
运载机器人作为自动化物流与物料搬运领域的核心设备,其设计需兼顾结构强度、运动灵活性与负载能力。核心作用在于替代人工完成重复性搬运任务,通过模块化底盘与可调式货叉的组合设计,可适配不同尺寸货物的装载需求。例如,采用四轮独立驱动结构,能显著提升机器人在狭窄通道或复杂地面的通过性;货叉部分配置液压升降机构,可实现货物垂直高度的精准调节,避免人工搬运时的体力消耗与安全隐患。
结构设计上,主体框架多选用高强度铝合金或碳钢材质,通过有限元分析优化应力分布,确保在额定负载下不发生形变。传动系统采用链轮与齿轮的复合传动模式,既能传递较大扭矩,又能通过齿轮减速比控制运行速度,避免货物因惯性滑落。为降低维护成本,关键部件如轴承、链条均采用标准化设计,便于快速更换与检修。
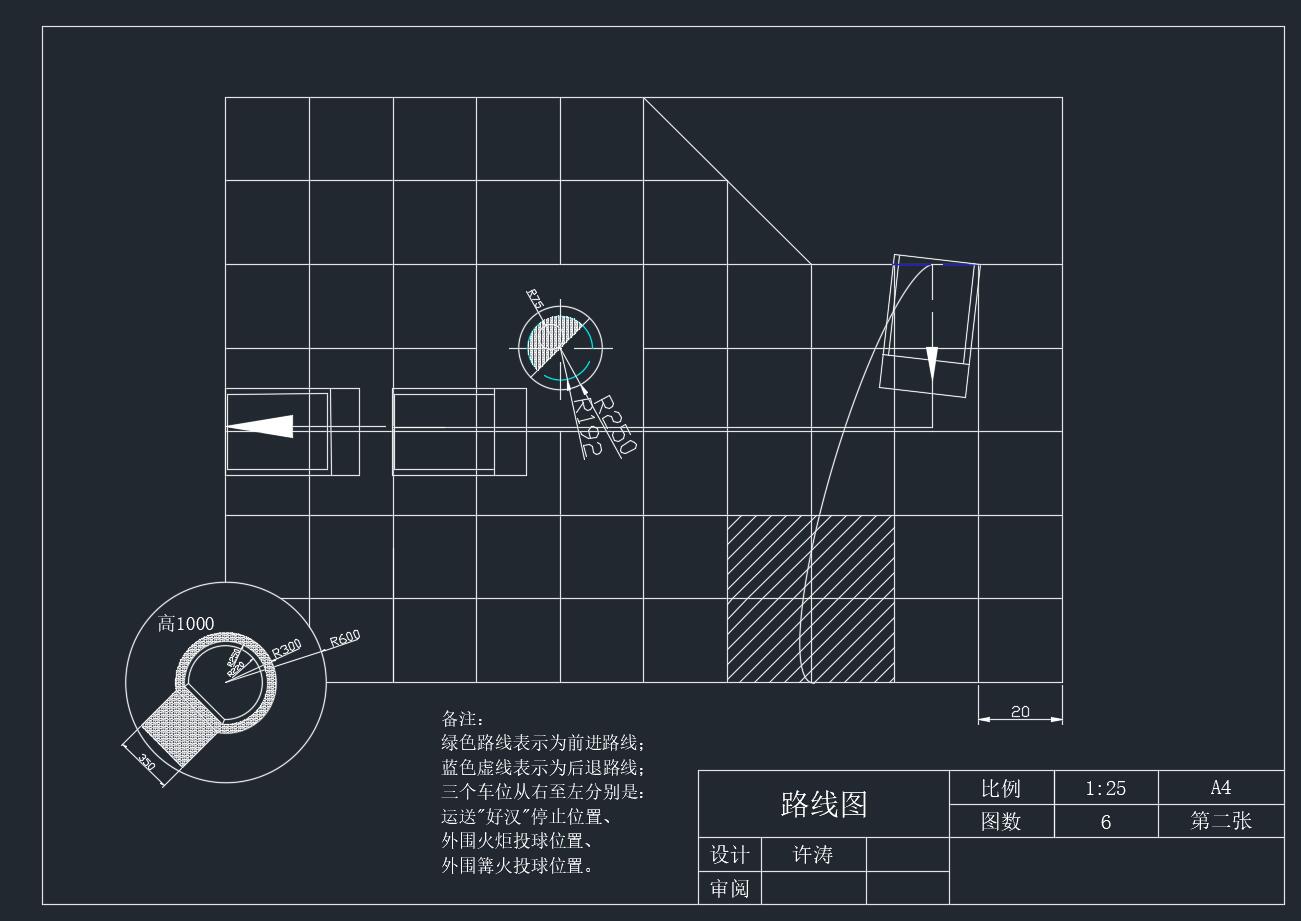
在运动控制方面,通过差速转向原理实现灵活转向,无需额外转向机构即可完成原地旋转,显著缩短路径规划时间。传感器布局上,前部安装超声波避障模块,实时监测前方障碍物距离;底部配置红外感应装置,可识别地面凹凸或台阶,避免碰撞或倾覆风险。这些设计使机器人能在无人干预下自主完成从取货点到存放点的全流程搬运。
针对不同应用场景,设计需预留扩展接口。例如,在仓储环境中可加装RFID读写器,实现货物信息的自动识别与记录;在生产线旁可集成机械臂对接模块,完成从搬运到装配的无缝衔接。这种模块化设计思路显著缩短了设计周期,同时降低了用户根据实际需求调整功能的难度。
本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。




评论













