焊接机器人毕业设计,含装配图,开题报告,说明书哦
内容
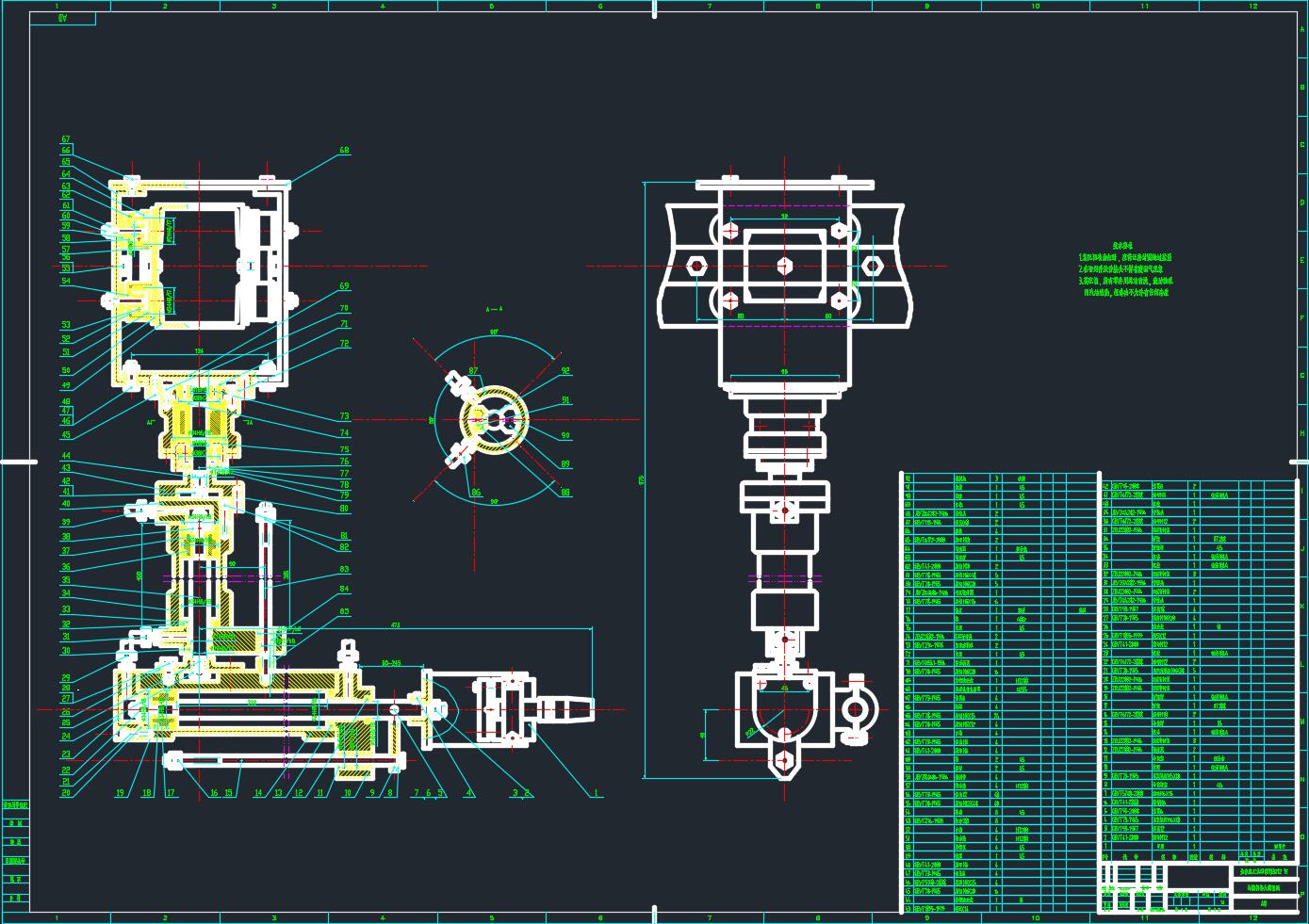
焊接机器人毕业设计是机械工程领域中一项极具实践价值的课题,其核心在于通过系统化设计实现焊接过程的自动化与标准化。该设计涵盖机械结构、控制系统、传感器集成三大模块,需结合焊接工艺需求完成装配图绘制、运动逻辑规划及人机交互界面设计。装配图作为设计的关键载体,需清晰标注各部件的装配关系、运动轨迹及干涉区域,为后续调试与优化提供直观参考。通过模块化设计思路,可显著降低系统复杂度,提升维护效率,同时为不同焊接场景的适应性调整预留技术接口。
开题报告是项目启动阶段的重要文档,需明确技术路线、创新点及预期成果。其内容需包含焊接工艺分析、机器人运动学建模、控制系统架构设计等关键环节,并通过文献综述论证方案的可行性。例如,在路径规划模块,需对比传统示教法与离线编程法的优劣,结合实际工况选择最优方案;在传感器选型部分,需根据焊接材料特性确定电弧传感器或视觉传感器的适用性。通过严谨的理论推导与仿真验证,可确保设计方向的科学性,为后续实施提供理论支撑。
设计说明书则侧重于技术细节的深度阐述,需包含机械部件的强度校核、控制算法的流程图、电气系统的接线规范等内容。例如,在机械臂设计部分,需通过有限元分析验证关键部件的应力分布,确保其满足长期高负荷运行需求;在控制程序编写环节,需采用模块化编程思想,将焊接参数设置、运动控制、故障诊断等功能独立封装,提升代码的可读性与可维护性。通过标准化文档的编写,可形成可复用的技术积累,为同类项目提供参考范式。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













