焊接机器人毕业设计,含装配图,开题报告,说明书
内容
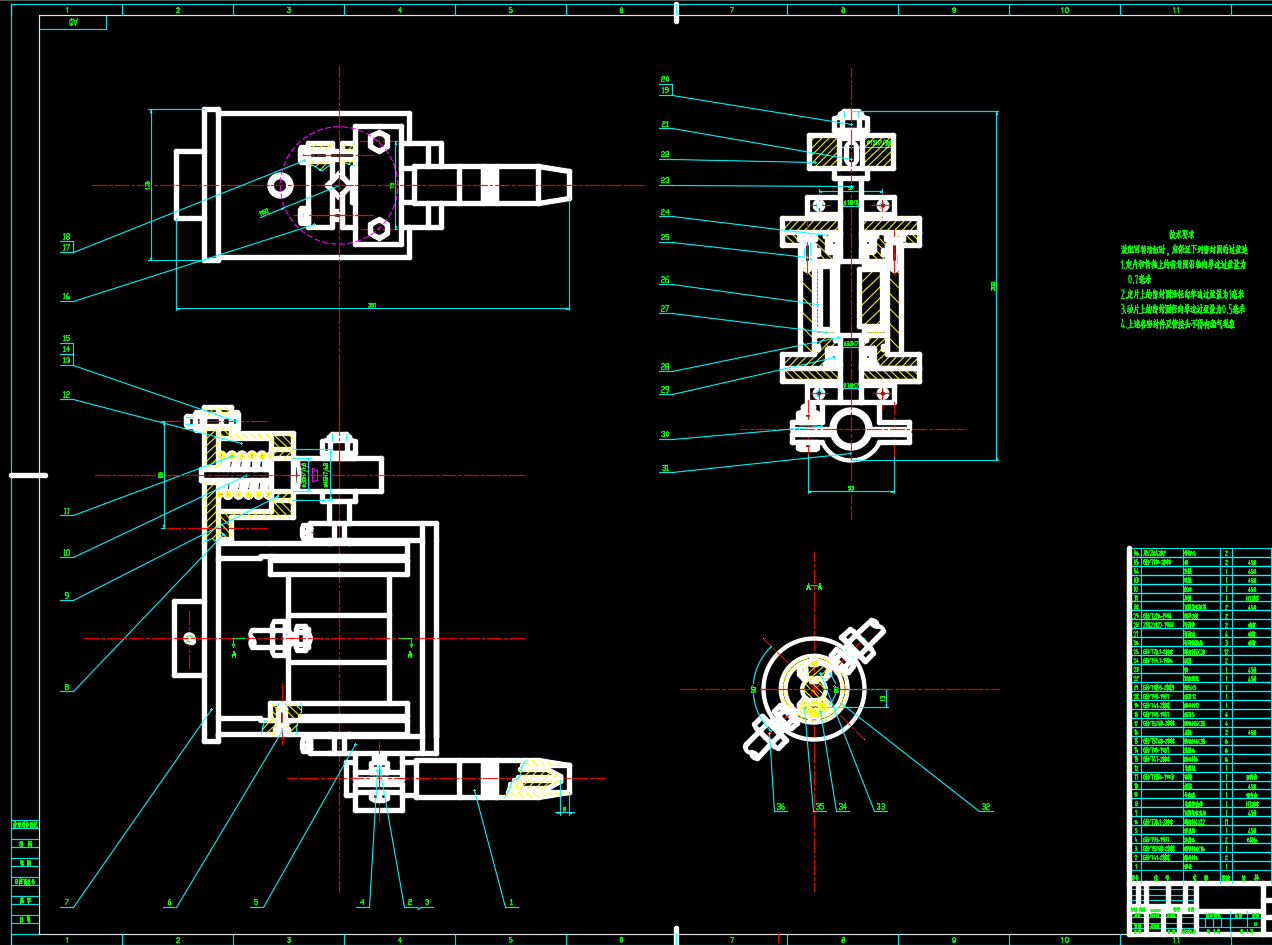
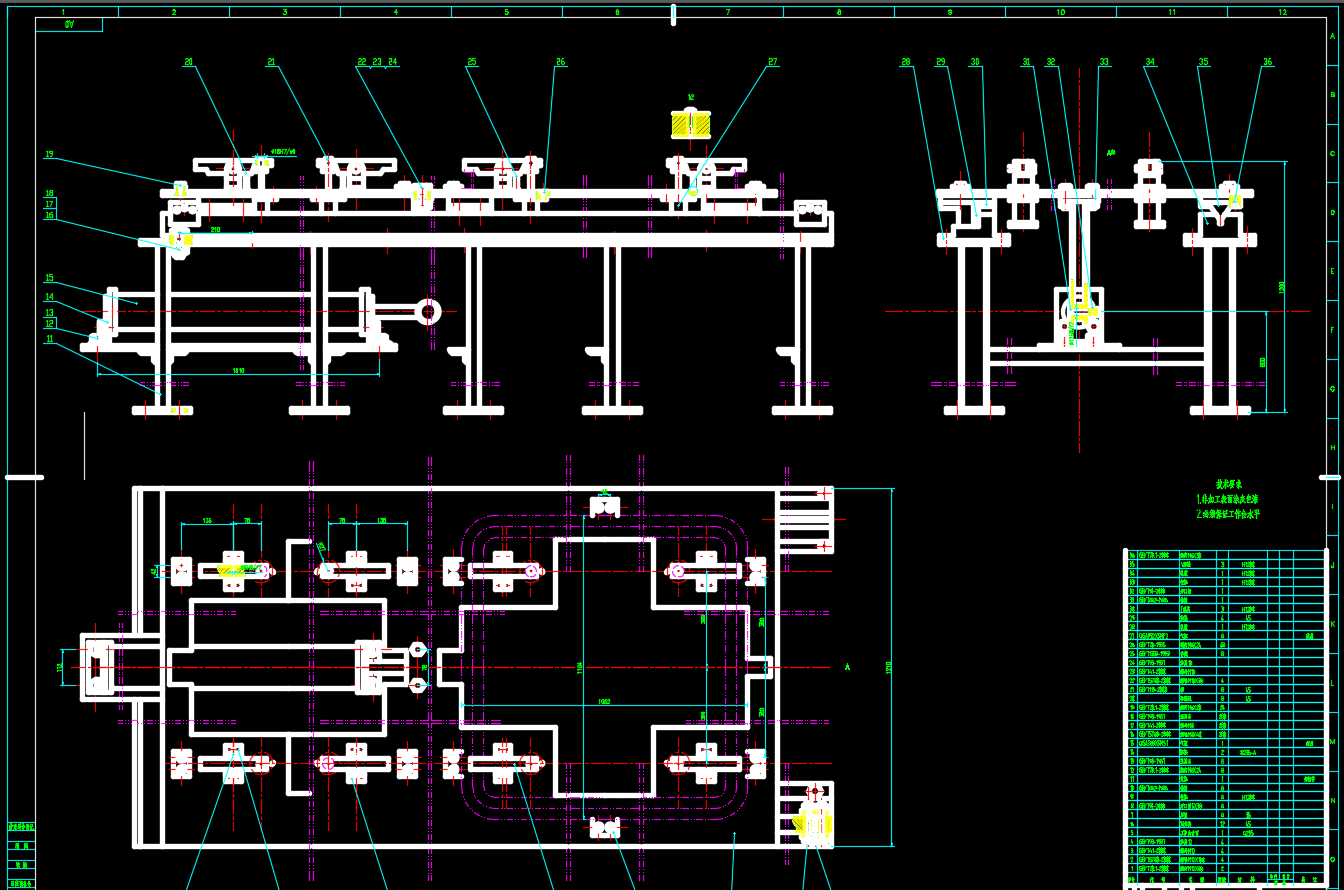
焊接机器人毕业设计是机械工程领域中一项综合性的实践课题,其核心在于通过系统化设计实现焊接作业的自动化与精准化。设计内容涵盖机械结构、电气控制、传感器应用及人机交互等多个模块,需综合运用机械设计、自动控制原理等学科知识。其中,装配图作为关键输出成果,需清晰标注各部件的装配关系、运动传递路径及定位方式,为后续调试与维护提供直观参考。开题报告则需明确研究背景、技术路线及创新点,例如通过优化机械臂结构提升焊接灵活性,或采用新型传感器提高焊缝跟踪精度,为整个设计奠定理论框架。
说明书是设计成果的详细阐述载体,需从功能需求分析入手,逐步拆解至零件级设计。例如,在机械结构部分,需说明末端执行器的夹持方式、传动机构的选型依据及材料热处理工艺;在控制部分,需描述PLC或单片机如何实现焊接参数的动态调整,以及安全保护机制的设计逻辑。此外,说明书还需包含调试步骤与验收标准,例如通过示教盒编程验证轨迹精度,或利用红外测温仪检测焊接热影响区,确保设计满足实际工况需求。整个过程强调理论与实践的结合,既要符合行业标准,又需体现个性化创新。
该设计对提升焊接效率与质量具有显著作用。传统手工焊接易受操作者技能水平、疲劳程度等因素影响,而机器人焊接通过程序控制可实现重复定位精度高、焊接参数稳定的目标。例如,在薄板焊接中,通过调整送丝速度与焊接电流的匹配关系,可有效减少烧穿或未熔合等缺陷;在复杂结构焊接中,机械臂的多自由度运动能覆盖传统设备难以触及的区域,显著缩短辅助时间。同时,设计过程需考虑人机协作安全性,如设置急停按钮、光幕防护等装置,避免意外发生。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













