机械手腕部设计【6CAD+优秀论文】
内容
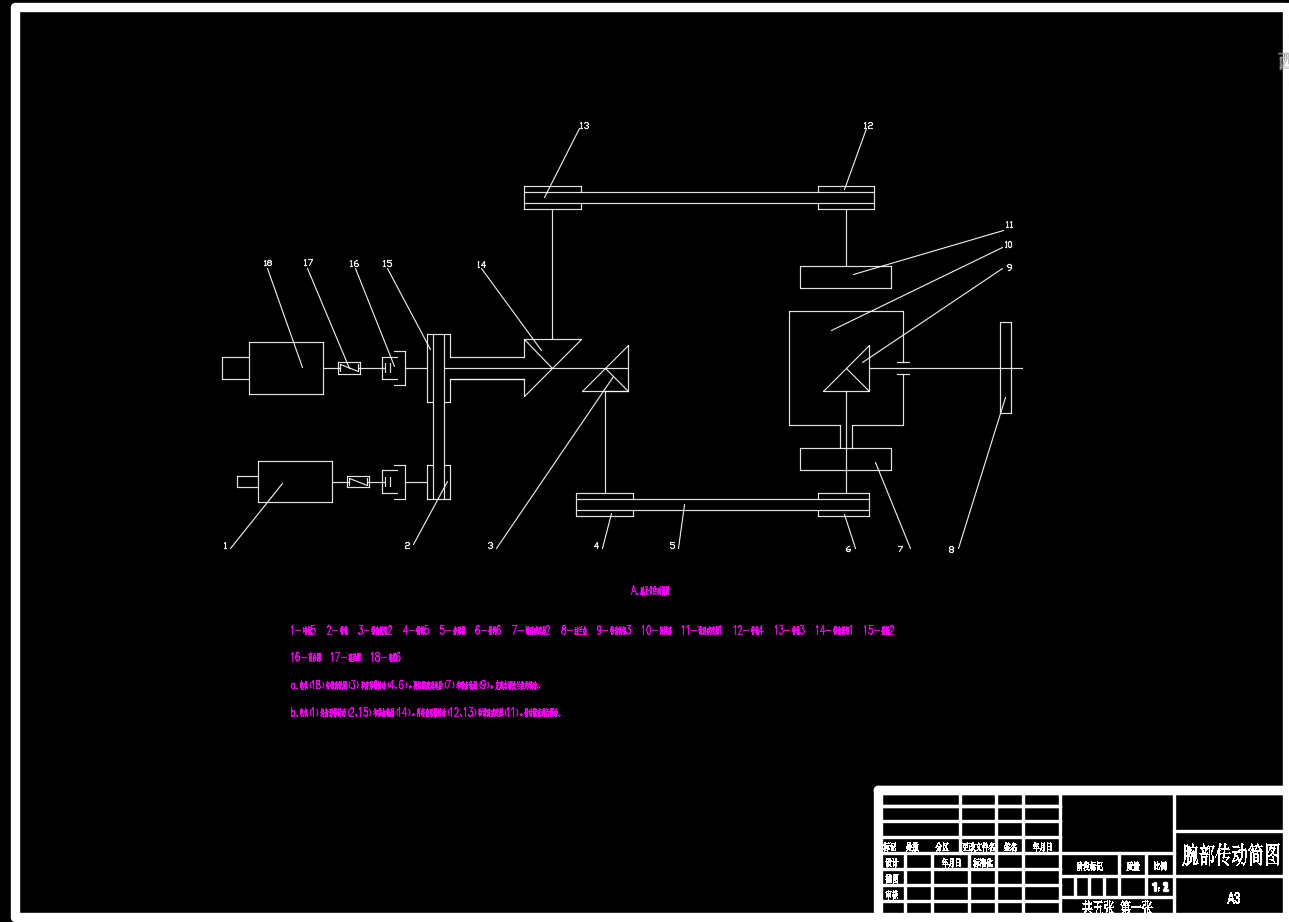
机械手腕部作为机械臂末端执行机构的核心部件,其设计直接决定了机械臂的作业精度与功能扩展性。腕部结构需同时满足多自由度运动、高负载承载及紧凑化布局的需求,通常采用模块化设计思路,通过串联或并联机构实现俯仰、偏航及回转等复合运动。典型设计包含驱动单元、传动组件与连接法兰三部分,其中驱动单元多选用高扭矩密度电机或谐波减速器,传动组件则通过齿轮、连杆或绳索机构实现运动解耦,确保各轴独立运动时的最小干涉。连接法兰作为末端工具的安装接口,需兼顾标准化与定制化需求,支持快速更换夹爪、焊枪或检测探头等执行器,以适应不同场景的作业要求。
在CAD设计阶段,腕部结构的建模需重点关注运动学分析与力学仿真。通过三维建模软件构建参数化模型,可快速验证不同构型的运动范围与奇异点分布,避免实际装配中的干涉问题。力学仿真则聚焦于应力集中区域与疲劳寿命预测,例如在关节连接处采用有限元分析评估材料强度,通过拓扑优化减少冗余结构,实现轻量化与高刚性的平衡。此外,腕部设计还需考虑环境适应性,如防尘防水密封结构、耐高温材料选型等,确保在恶劣工况下稳定运行。
优秀论文中常提及的“仿生腕部设计”为该领域提供了新思路。通过模拟人类手腕的骨骼-肌肉协同机制,采用柔性驱动器与变刚度结构,可显著提升机械腕的适应性与操作灵活性。例如,基于气动人工肌肉的驱动方案能实现连续弯曲运动,而磁流变液的应用则使腕部刚度可随负载动态调整。这类设计虽增加了控制复杂度,但在医疗辅助、精密装配等场景中展现出独特优势,成为当前研究的热点方向。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。


评论













