机械手毕业设计
内容
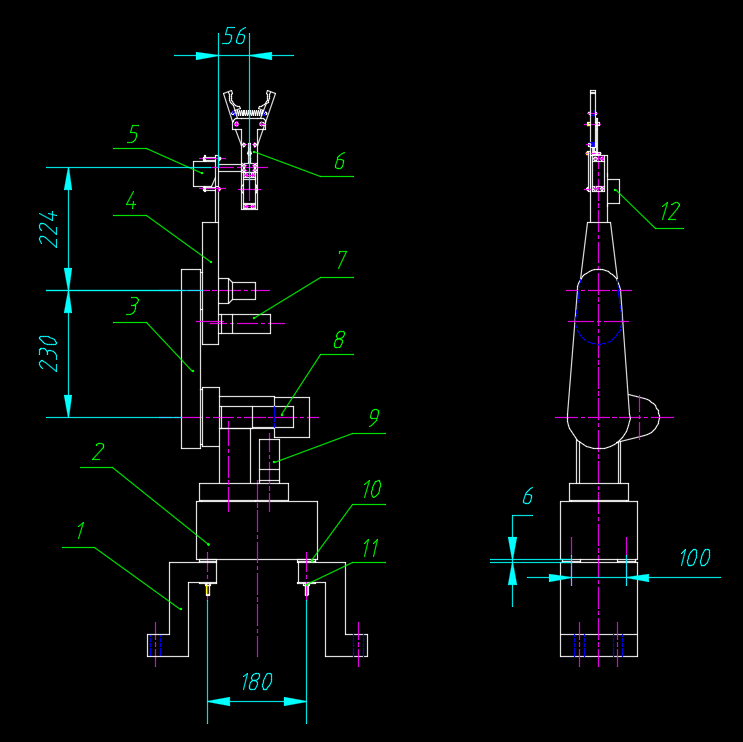
机械手作为自动化领域的关键执行装置,其核心作用在于替代人工完成重复性、高精度或危险环境下的操作任务。通过预设程序控制机械臂的轨迹与动作,机械手可实现物料搬运、零件装配、质量检测等工序的自动化衔接。其结构设计需兼顾刚性与灵活性,采用模块化关节组件与轻量化材料,既能承受动态载荷,又能适应狭小空间作业需求。末端执行器的多样化设计(如夹爪、吸盘、焊枪等)进一步扩展了应用场景,使其成为工业制造、物流仓储、医疗辅助等领域的核心装备。
机械手的控制系统是其功能实现的核心,通过传感器与执行器的协同工作,实现位置、速度、力矩的精准闭环控制。位置传感器(如编码器、激光测距仪)实时反馈关节角度与末端位姿,确保动作精度;力传感器则通过监测接触力变化,避免过载或损伤工件。控制算法层面,PID控制与模糊控制等经典方法被广泛应用于轨迹规划与误差补偿,部分场景还引入机器学习优化动态响应特性。这种软硬件结合的设计模式,显著提升了机械手对复杂任务的适应能力。
在应用效能层面,机械手通过减少人工干预显著缩短了工序衔接时间,同时避免了因疲劳或操作误差导致的产品缺陷。其可编程特性支持快速切换生产任务,仅需调整控制参数即可适配不同规格的工件,这种灵活性为多品种、小批量生产模式提供了技术支撑。此外,机械手在高温、高压、辐射等极端环境下的稳定运行能力,进一步拓展了工业自动化的边界,成为提升生产安全性与效率的重要工具。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













