机械手-机械手夹持器设计(说明书+2张CAD图纸)
内容
机械手夹持器作为机械手末端执行的核心部件,其设计直接影响机械手在搬运、装配、加工等场景中的操作精度与稳定性。其核心作用在于通过适配不同工件的形状、尺寸及材质特性,实现可靠抓取与精准释放。例如,针对表面光滑的金属工件,夹持器需具备足够的摩擦力与夹持力,避免滑脱;而对于易碎的陶瓷或玻璃制品,则需通过柔性接触设计分散压力,防止损伤。这一功能实现依赖于夹持器的结构形式、驱动方式及材料选择,三者需协同优化以满足多样化工况需求。
在结构设计层面,机械手夹持器通常由驱动模块、传动机构、夹爪组件及连接接口四部分构成。驱动模块提供动力来源,常见形式包括气动、电动及液压驱动,其中电动驱动因控制精度高、响应速度快,成为精密场景的首选;传动机构负责将驱动动力转化为夹爪的直线或旋转运动,齿轮齿条、连杆机构及丝杠螺母等结构被广泛应用;夹爪组件直接接触工件,其形状设计需与工件轮廓匹配,如平行夹爪适用于规则块状物,V型夹爪则擅长抓取圆柱形工件;连接接口则需与机械手末端法兰标准化对接,确保兼容性与互换性。通过模块化设计,各组件可独立优化,显著缩短设计周期。
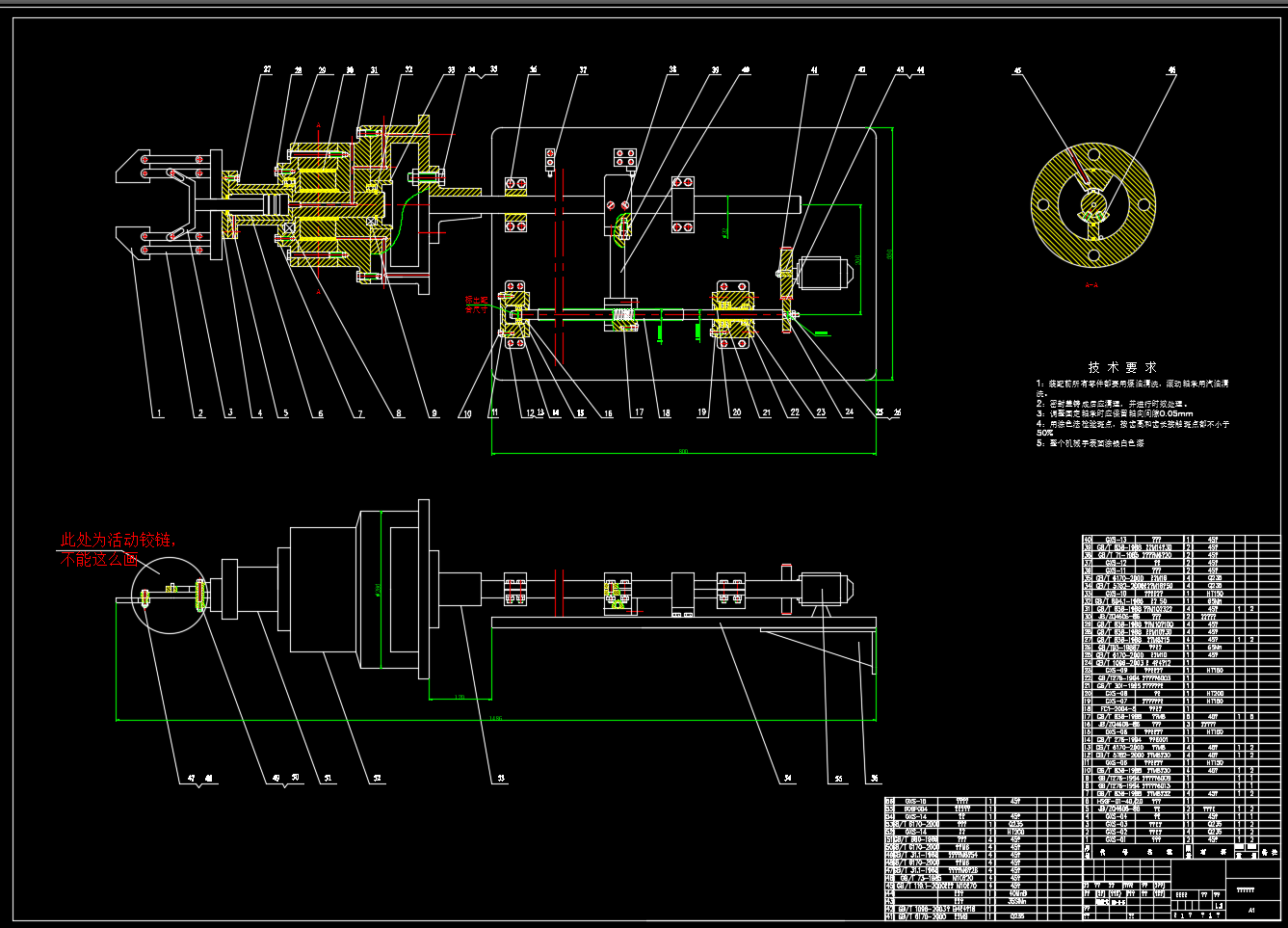
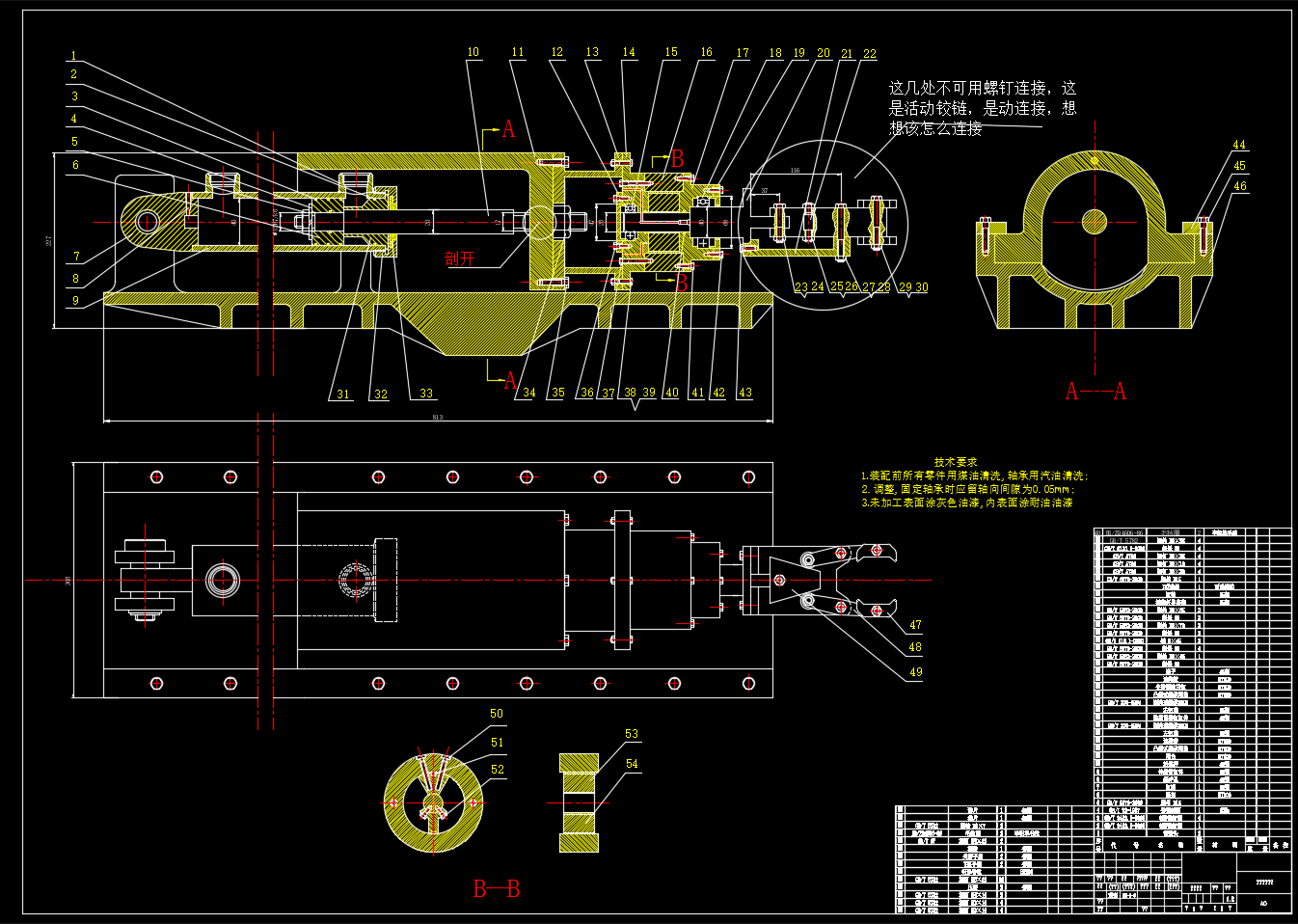
实用资料中包含的CAD图纸进一步呈现了夹持器的细节设计。图纸一展示了夹持器的整体装配结构,标注了关键尺寸链与装配关系,便于理解各组件的空间布局;图纸二则聚焦于夹爪组件的局部视图,详细描绘了接触面的纹理处理与防滑结构,为实际加工提供参考。两份图纸均采用行业标准符号与标注规范,确保技术信息的准确传递。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













