机械手-机械手夹持器毕业设计(论文+一张CAD装配图)
内容
机械手夹持器作为机械手系统的核心执行部件,其设计质量直接影响机械手的作业精度与稳定性。其核心作用在于通过合理的结构设计与力学分配,实现对目标物体的可靠抓取、定位与释放。在工业自动化场景中,夹持器需适应不同形状、尺寸及材质的工件,因此需具备可调节的夹持力与灵活的接触方式。例如,针对精密电子元件的抓取,需采用柔性接触结构以避免损伤;而针对重型工件的搬运,则需强化结构刚度与驱动能力。这种多功能适应性要求设计过程中需综合考量材料力学、摩擦学及传动原理,确保夹持器在复杂工况下仍能保持高效运行。
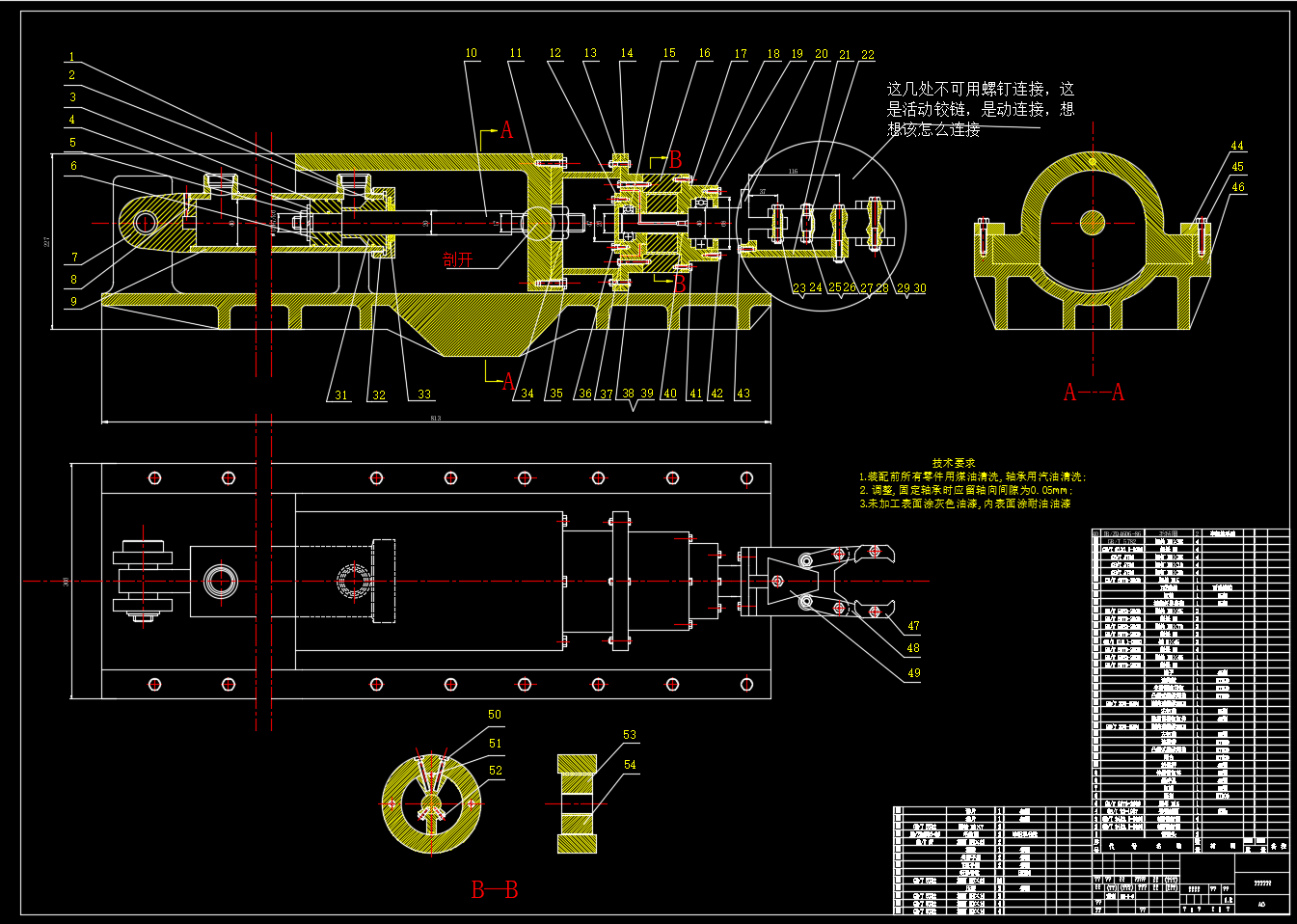
从结构组成来看,机械手夹持器通常包含驱动模块、传动机构、夹爪组件及传感系统。驱动模块多采用电机、气缸或液压缸作为动力源,通过减速器或连杆机构将动力传递至夹爪;传动机构的设计需兼顾传动效率与运动平稳性,常见形式包括齿轮齿条、蜗轮蜗杆及连杆滑块等;夹爪组件则根据应用需求设计为平行开合、回转型或自适应型,其表面材质需根据工件特性选择橡胶、金属或复合材料以优化摩擦性能;传感系统的集成可实时监测夹持力、位置及工件状态,为闭环控制提供数据支持。各模块的协同设计需通过力学仿真与运动分析验证,确保结构强度满足载荷要求且运动轨迹无干涉。
在CAD装配图中,机械手夹持器的设计细节需通过三维建模与二维投影清晰呈现。装配图应标注关键零部件的装配关系、配合公差及运动副类型,例如夹爪与基座的旋转配合需明确标注间隙范围,传动轴与轴承的过盈配合需标注压入力要求。此外,装配图还需包含爆炸视图以展示内部结构层次,并通过剖面图呈现隐藏的传动路径。通过标准化图例与尺寸标注,装配图可为后续加工与装配提供精确指导,显著缩短设计迭代周期。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













