LX26带马达单轴驱动器单轴机器人模型
内容
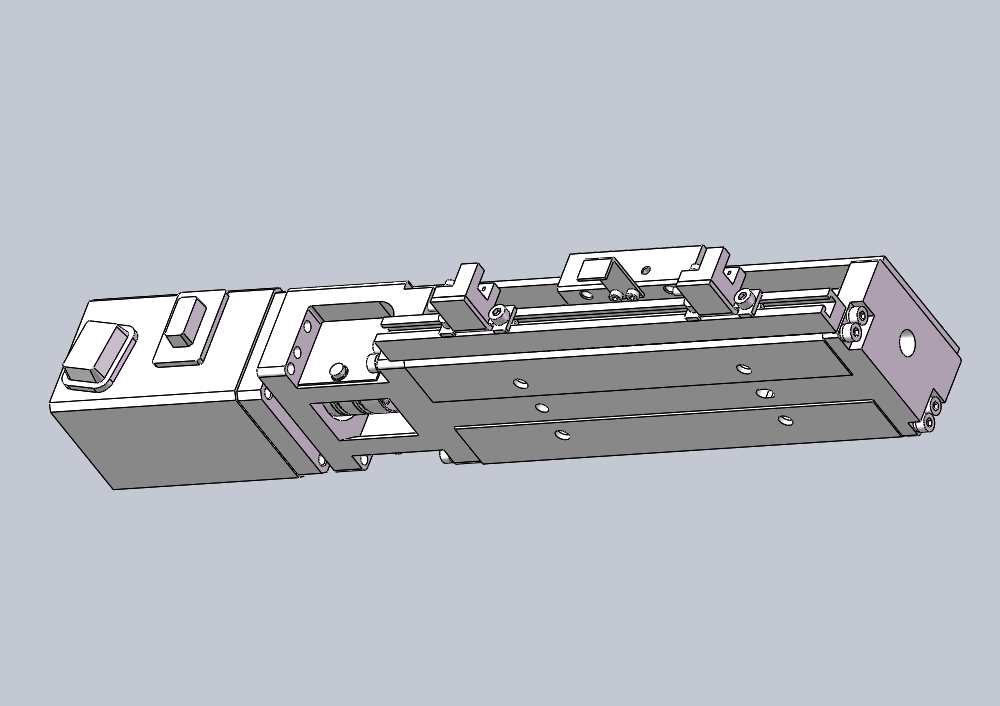
LX26带马达单轴驱动器单轴机器人模型是自动化领域中实现精准直线运动的核心组件,其设计融合了驱动、传动与控制功能,通过单一轴向的线性运动满足工业场景中对定位精度、重复性及响应速度的高要求。该模型以马达为动力源,通过驱动器将电能转化为机械能,驱动负载沿预设轨迹做直线往复运动,适用于物料搬运、装配定位、检测分拣等需要高精度位移控制的场景。其核心作用在于通过集成化设计简化系统结构,减少多轴协同的复杂度,同时通过闭环控制算法确保运动轨迹的稳定性与可靠性。
从结构组成看,该模型主要由驱动单元、传动机构、导轨系统及负载平台构成。驱动单元采用高性能马达与驱动器一体化设计,支持速度、位置及扭矩的实时调节;传动机构多选用高精度滚珠丝杠或同步带,兼顾传动效率与运动平稳性;导轨系统则通过线性滑轨或交叉滚子导轨提供低摩擦、高刚性的支撑,确保负载在运动过程中无偏移或抖动。各模块通过标准化接口连接,既降低了装配难度,又便于后期维护与功能扩展。
在控制层面,LX26模型支持多种通信协议与编程接口,可与PLC、工业电脑或上位机软件无缝对接,实现运动参数的动态调整与状态监测。通过内置的PID控制算法,系统能自动补偿负载变化、摩擦阻力等外部干扰,确保运动精度达到微米级。此外,其驱动器还具备过载保护、急停响应及故障诊断功能,可有效避免因意外操作或环境因素导致的设备损坏,提升系统运行的安全性与稳定性。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













