JQR-00码跺机器人总装
内容
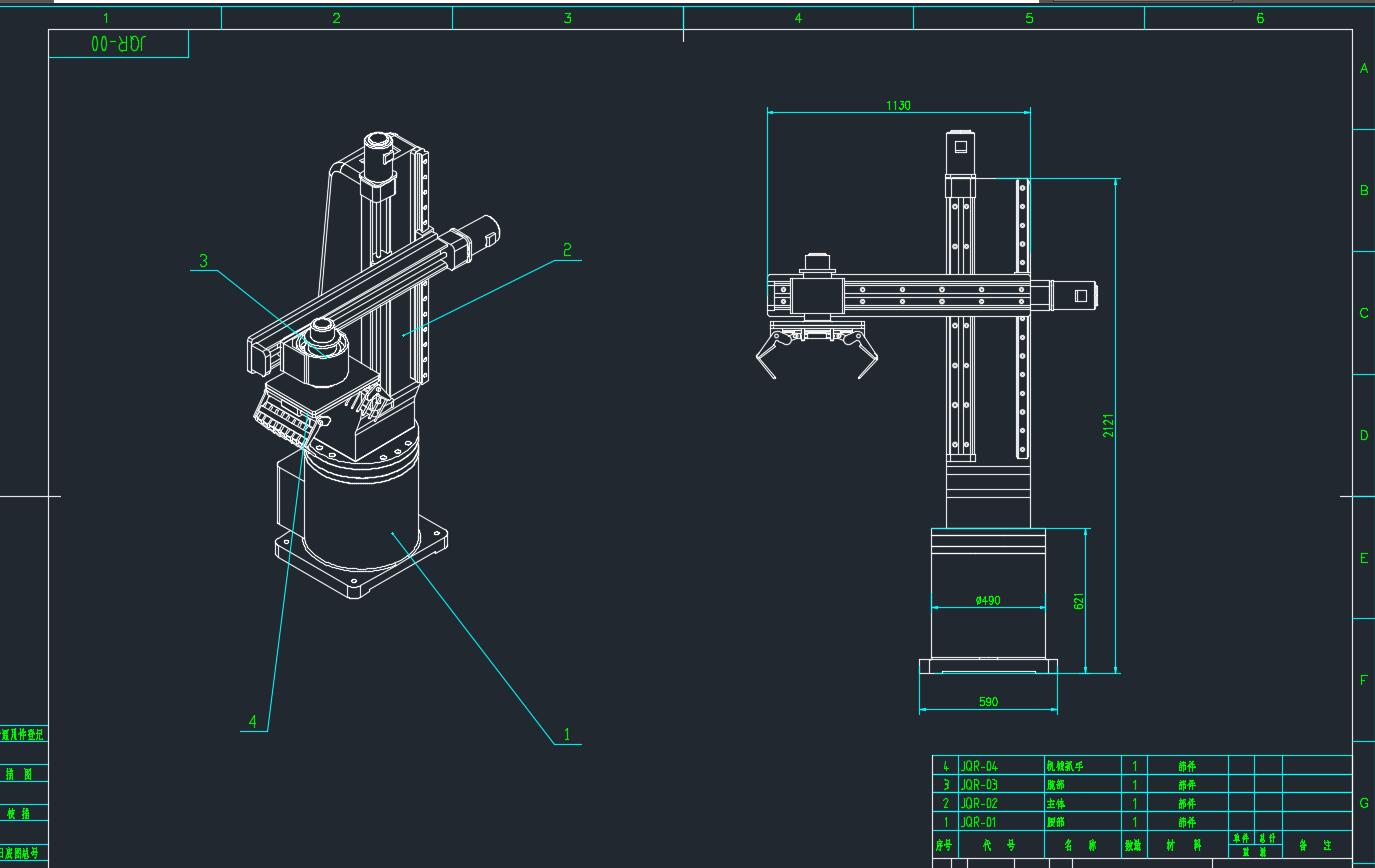
JQR-00码跺机器人总装是物流自动化领域的重要实践,其核心作用在于通过模块化集成与精准定位技术,实现货物码垛环节的高效协同。该总装方案聚焦于机械结构、动力传输与控制逻辑的深度融合,通过优化各组件间的配合精度,确保机器人在复杂作业场景中稳定运行。其设计理念突破了传统码垛设备的单一功能局限,将抓取、搬运、堆叠等动作整合为连续作业流程,显著提升物流环节的吞吐效率。
机械结构方面,总装采用轻量化合金框架与高强度连接件,在保证整体刚性的同时降低能耗。动力系统通过伺服电机与减速机的精准匹配,实现运动轨迹的平滑控制,避免因惯性导致的定位偏差。控制模块则基于工业级传感器网络,实时采集作业数据并反馈至中央处理器,形成闭环调节机制。这种设计不仅提升了码垛精度,还通过冗余设计增强了系统的抗干扰能力,适应不同规格货物的处理需求。
在空间利用率优化上,总装方案通过三维建模技术对作业区域进行动态规划,确保机器人在有限空间内完成多角度转向与堆叠动作。其末端执行器采用可更换式设计,通过快速换装夹具即可适配不同形状、材质的货物,大幅扩展了应用场景。此外,总装过程中的装配工艺经过多次迭代优化,减少了过多零件的堆叠,降低了后期维护成本。
安全性能是总装设计的另一重点。通过集成碰撞检测、急停保护与视觉避障功能,系统可在异常情况下自动暂停作业并发出警报,避免设备损坏或人员伤亡。同时,总装方案预留了扩展接口,支持与仓储管理系统(WMS)的无缝对接,为智能化升级提供技术储备。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













