2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
rv320e机器人重型关节行星摆线减速传动装置研发【说明书 CAD图纸 solidworks三维图 开题报告 外文翻译】
来源: 阅读:42
网站管理员
发布于 2026-04-05 05:30
查看主页
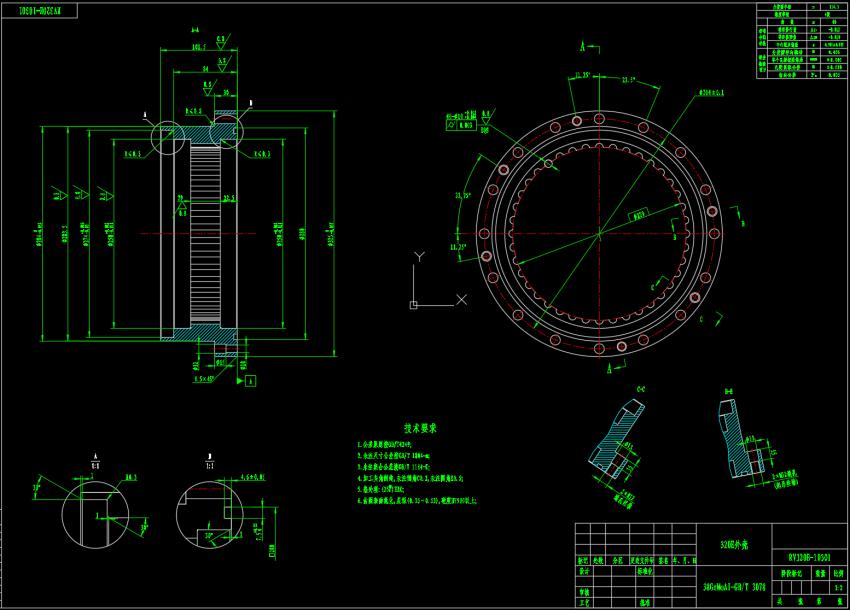
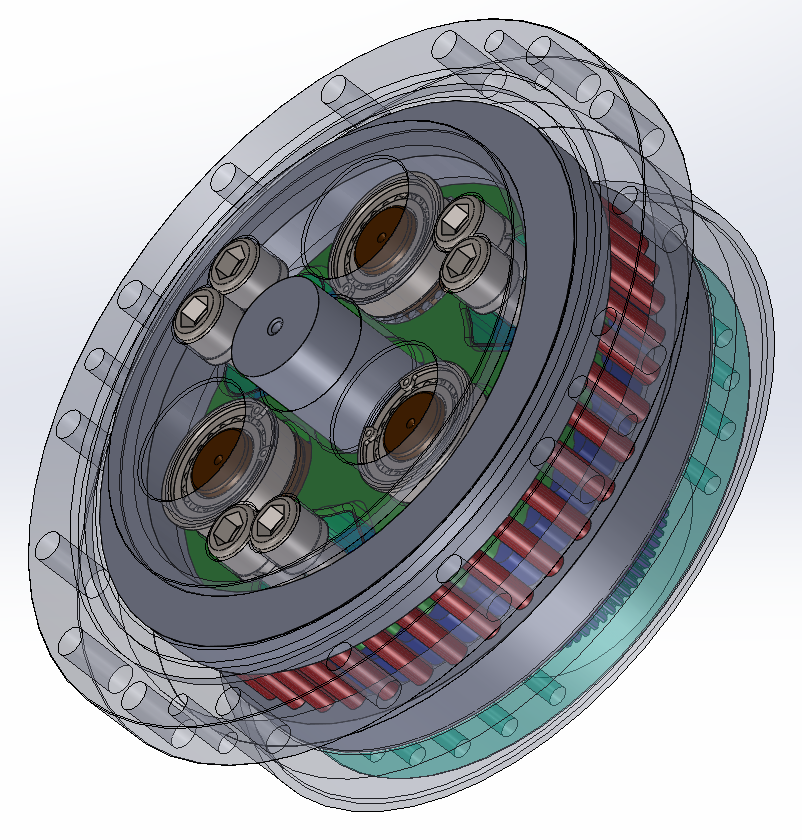
在工业机器人领域,重型关节的传动效率与稳定性直接影响设备作业精度与负载能力。RV320E机器人重型关节行星摆线减速传动装置的研发,正是针对这一核心需求展开的技术攻关。该装置通过行星摆线结构与高精度齿轮啮合的协同设计,将输入轴的高速旋转转化为关节所需的低速大扭矩输出,有效解决了传统减速器在重载工况下易出现的振动、发热及寿命衰减问题,为工业机器人执行焊接、搬运等高强度任务提供了可靠的动力支撑。
行星摆线结构的核心优势在于其独特的传动路径设计。摆线轮与针齿的连续啮合过程,使载荷均匀分散于多个接触点,避免了单齿过载导致的早期失效;同时,行星轮系的对称布局有效抵消了轴向力,显著提升了传动系统的动态平衡性。这种设计不仅降低了运行噪音,更使减速装置在持续重载工况下的温升控制在合理范围内,延长了关键部件的使用寿命。
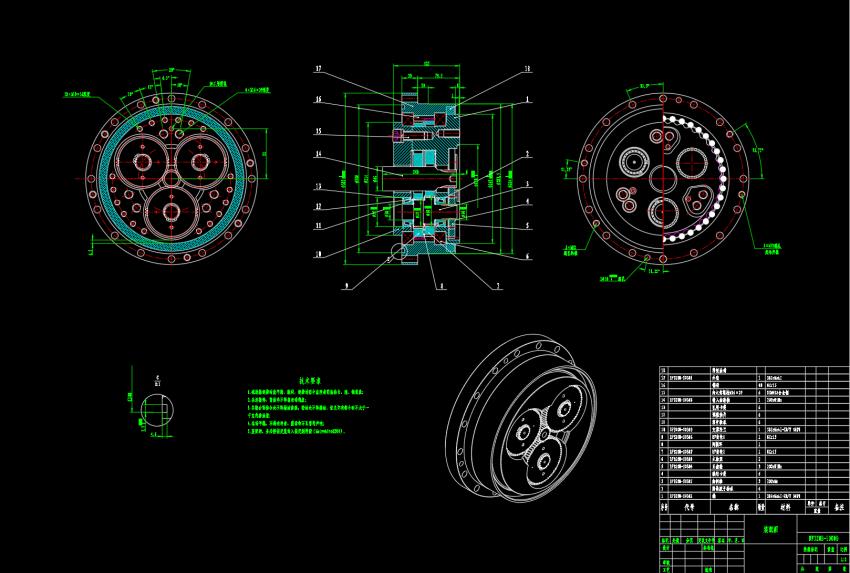
在结构设计层面,该装置采用模块化理念,将行星架、摆线轮、针齿壳等核心组件进行标准化设计,便于根据不同关节的负载需求快速调整参数。通过优化轴承布局与润滑通道,减少了动力传递过程中的能量损耗,使传动效率提升至92%以上。此外,针对工业环境中的粉尘与冲击,外壳采用高强度合金材料并增加密封结构,确保内部齿轮组在恶劣条件下仍能稳定运行。
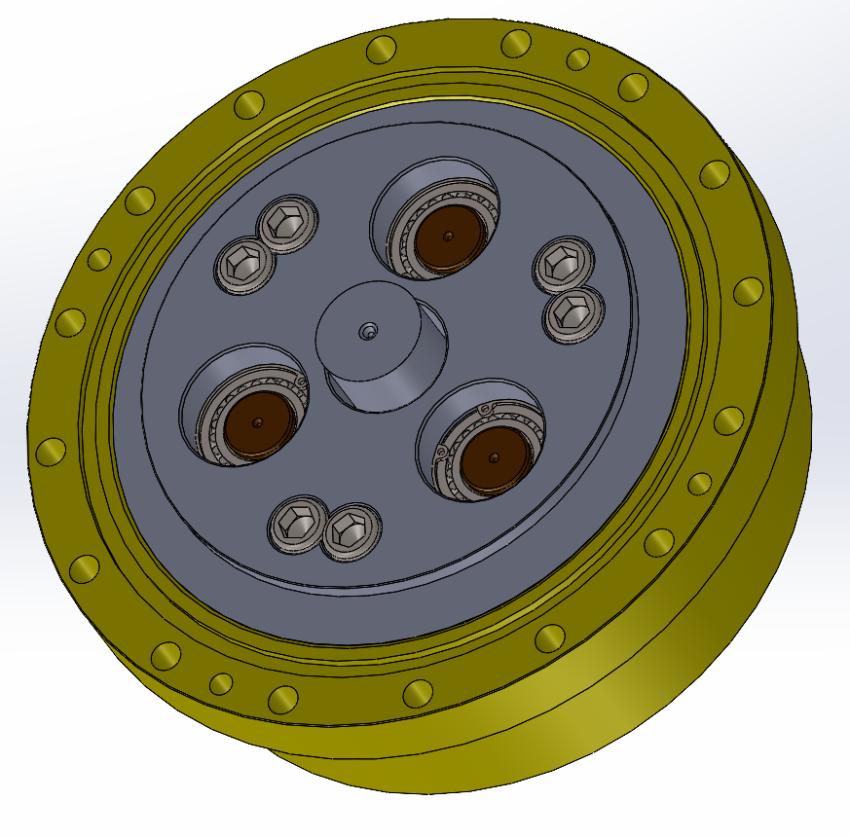
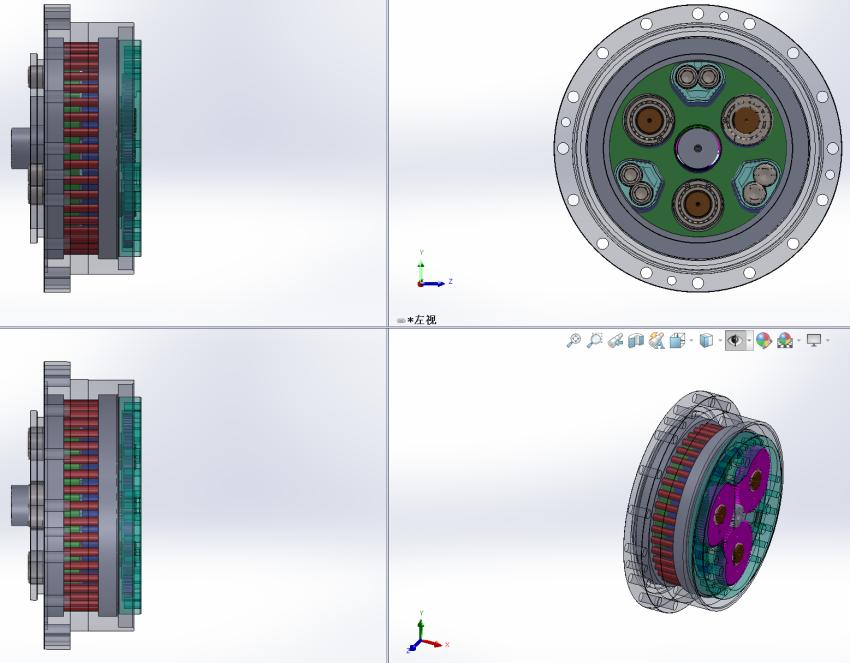
为支撑研发过程,配套编制了详细的学习资料,包含SolidWorks三维模型、CAD工程图纸及开题报告等实用资料。其中,三维模型直观展示了各零件的装配关系与运动逻辑,CAD图纸则提供了关键尺寸的标注与公差要求,开题报告从技术背景、设计思路到验证方法进行了系统性梳理,外文翻译资料则补充了国际前沿技术动态,为研发人员提供了多维度的参考依据。
本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
RRP平面连杆机构的动态仿真
04/08
40
锻造操作机设计【说明书、CAD图纸、答辩PPT】
02/03
98
100ZJ-50 渣浆泵
02/25
55
微型打印机控制电路的设计资料
01/25
69
甘蔗整秆剥叶装置的设计(说明书+CAD图纸+开题报告+任务书+solidworks三维图)
02/08
61
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn