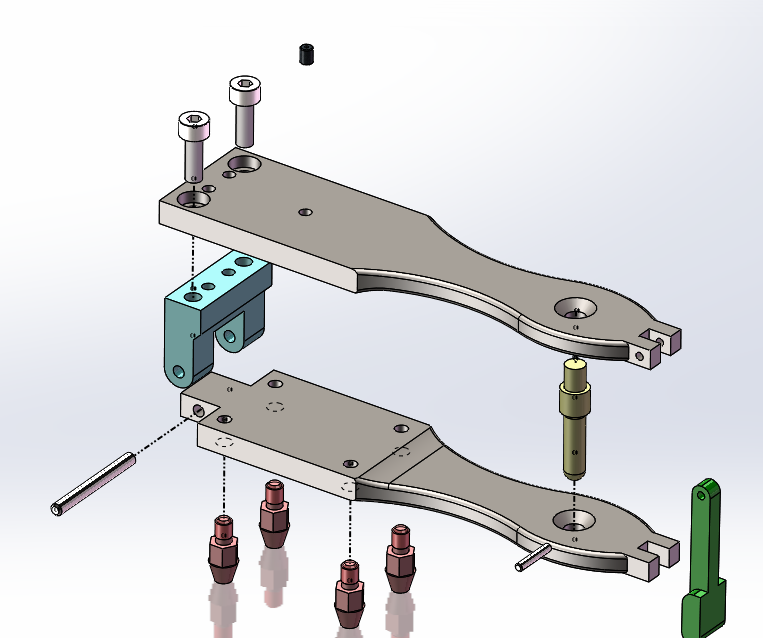
手柄翻开式钻模模架是机械加工中常用的定位夹紧装置,其核心作用在于通过可翻转的手柄结构,快速实现工件的装夹与释放,同时确保钻削过程中孔位的高精度定位。传统建模方式依赖手工绘图与反复修改,而SolidWorks参数化建模技术通过定义关键尺寸变量,将模架的几何特征与参数关联,使设计者仅需调整数值即可驱动模型自动更新。例如,手柄长度、夹紧块间距等参数的修改,可直接反映在三维模型中,避免重复建模的繁琐步骤,显著缩短设计周期。
参数化建模的另一优势在于支持设计方案的快速迭代。通过建立参数关联规则,模架的各部件(如底座、导柱、手柄组件)可实现同步更新,确保装配关系始终匹配。例如,当修改手柄的旋转角度参数时,与之配合的锁紧机构会自动调整位置,避免干涉。这种“牵一发而动全身”的设计逻辑,极大提升了设计的灵活性与准确性,尤其适用于需要多次优化的复杂结构。
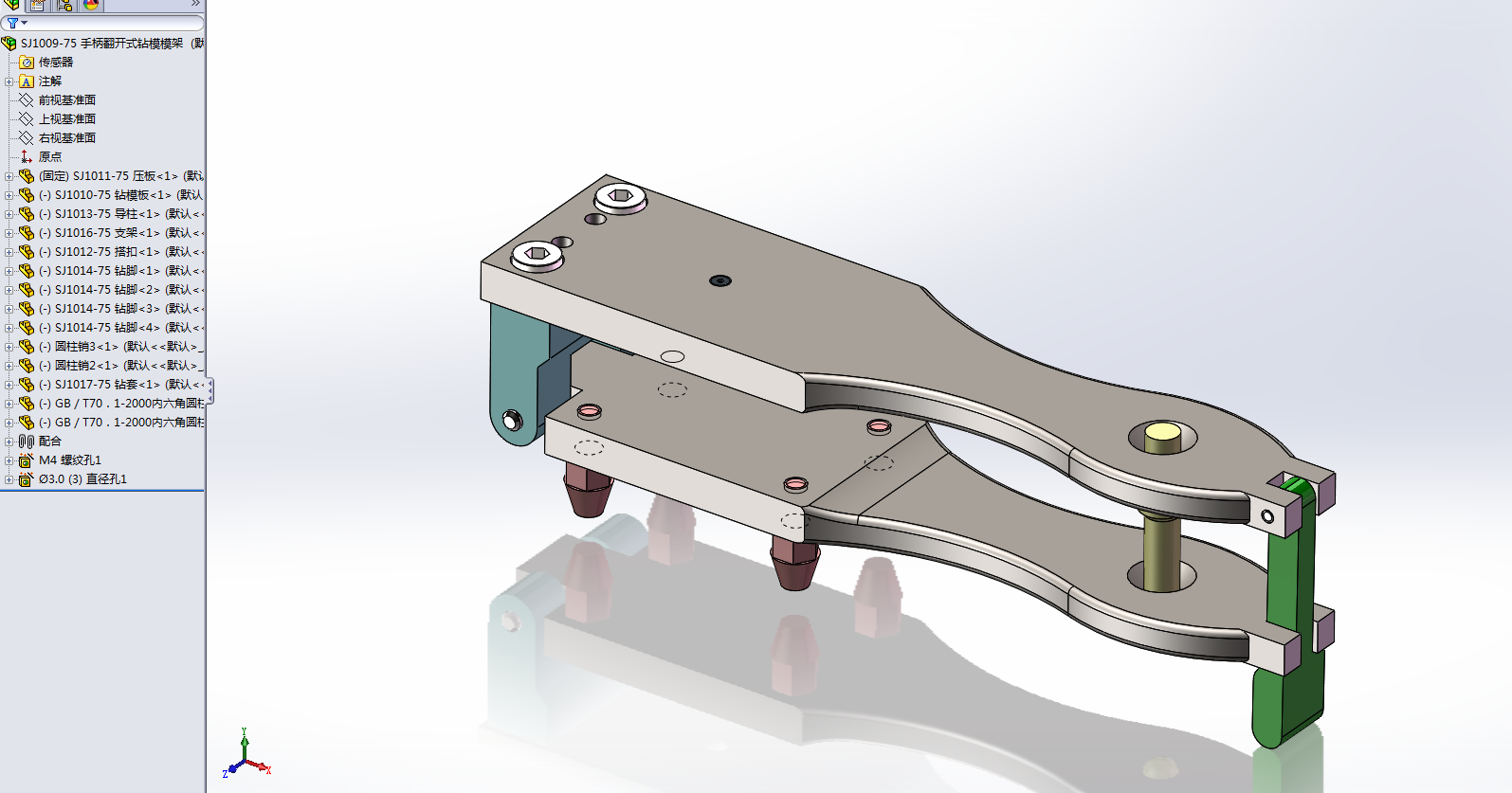
虚拟装配则进一步验证设计的合理性。在SolidWorks环境中,设计者可将参数化生成的零件导入装配体,通过约束关系(如同轴、平行、距离)模拟实际装配过程。例如,检查手柄翻转时是否与导柱发生碰撞,或夹紧块与工件的接触面积是否足够。通过动态拖动零件观察运动状态,可提前发现设计缺陷,减少物理样机试制的风险与成本。
将参数化建模与虚拟装配结合,还能生成标准化的三维图库。设计者可将不同规格的模架模型分类存储,后续调用时仅需修改关键参数即可生成新方案。这种模块化设计思路,不仅提升了设计效率,也为后续的工艺规划、数控编程等环节提供了可靠的数据基础。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。