2D/3D/图纸
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
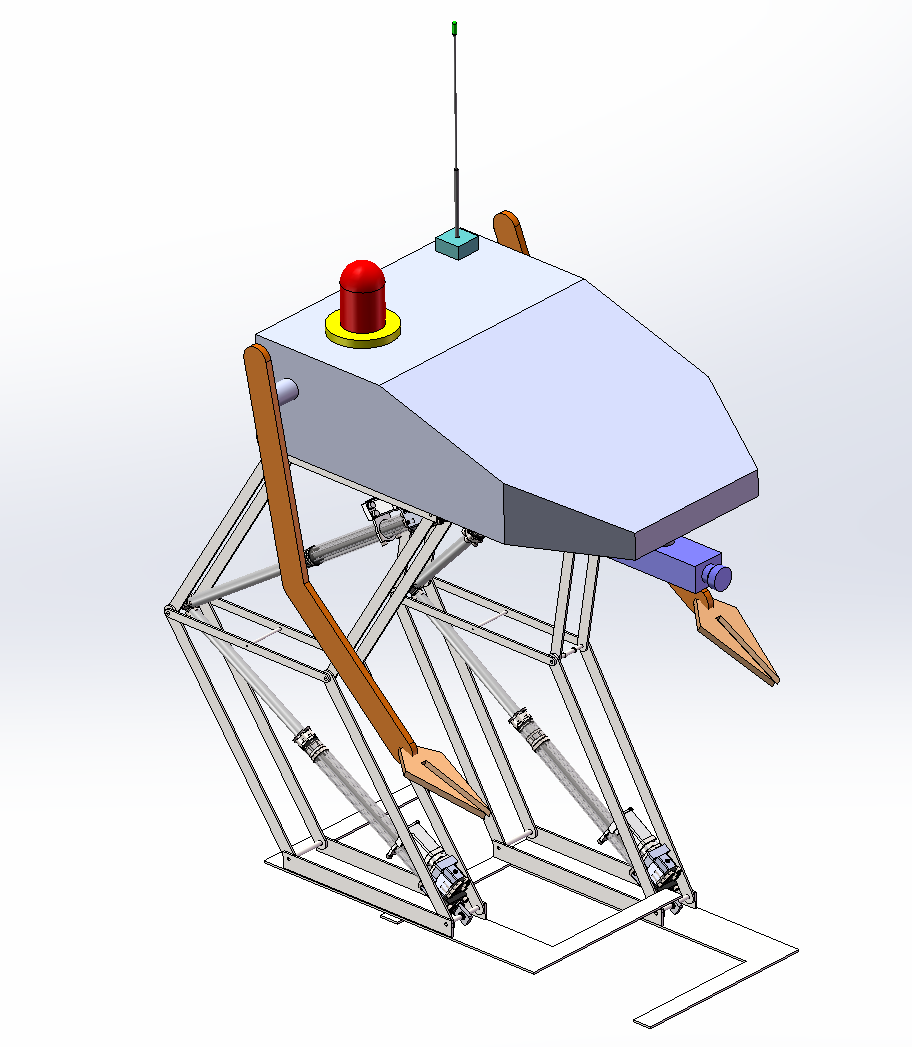
平行四边形双足步行机器人的设计与研究【三维solidworls+CAD图纸+毕业论文+运动仿真视频】
来源: 阅读:59
网站管理员
发布于 2026-03-12 19:30
查看主页
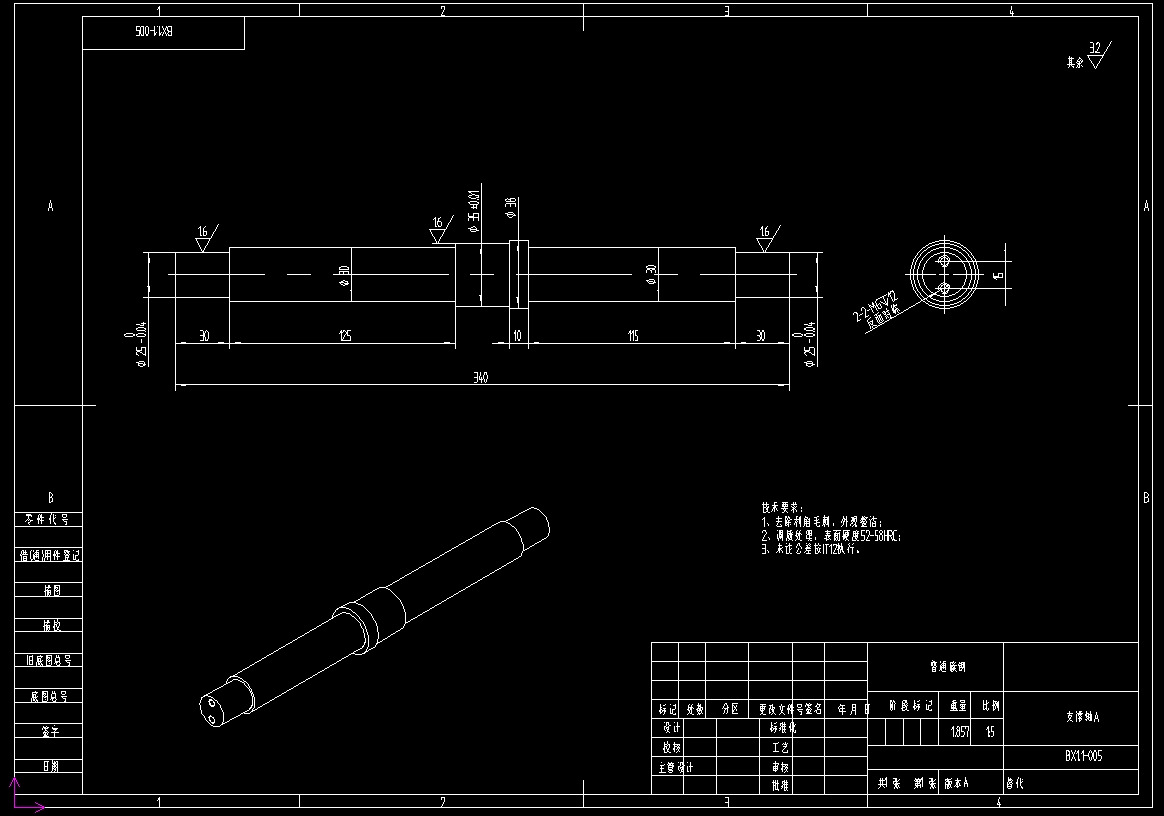
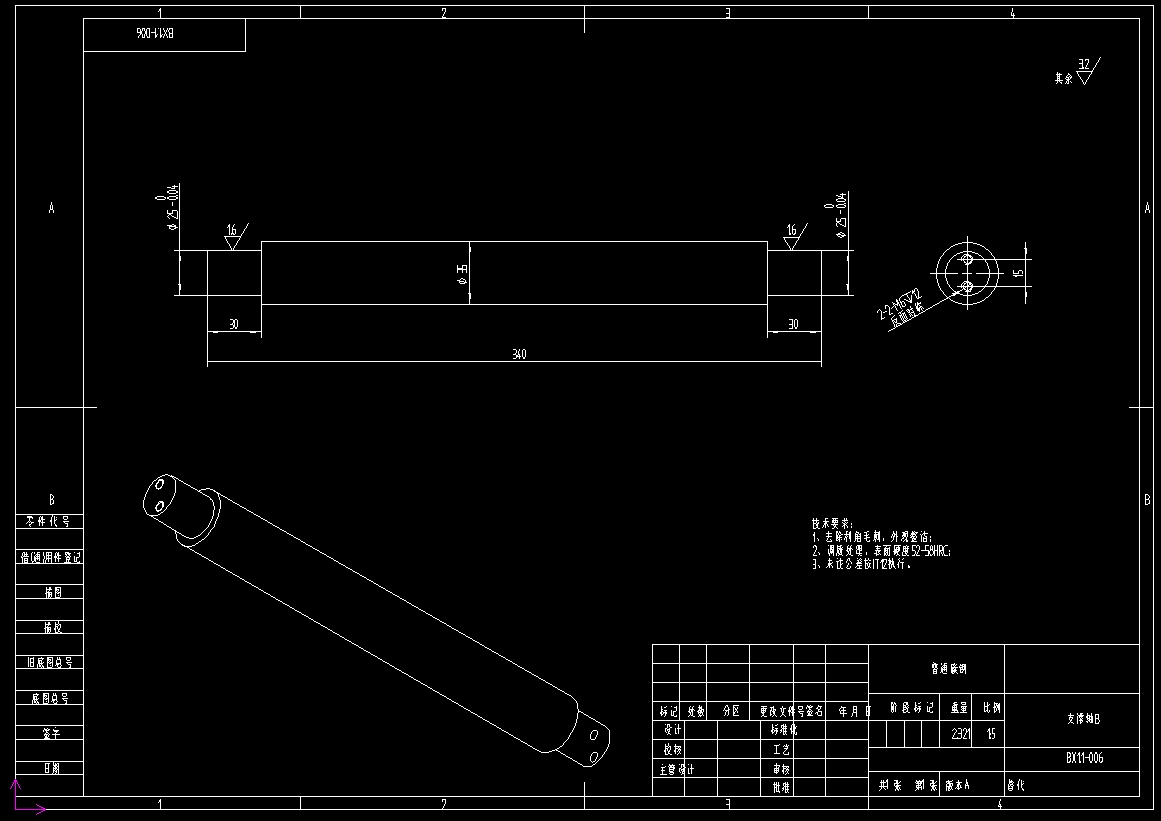
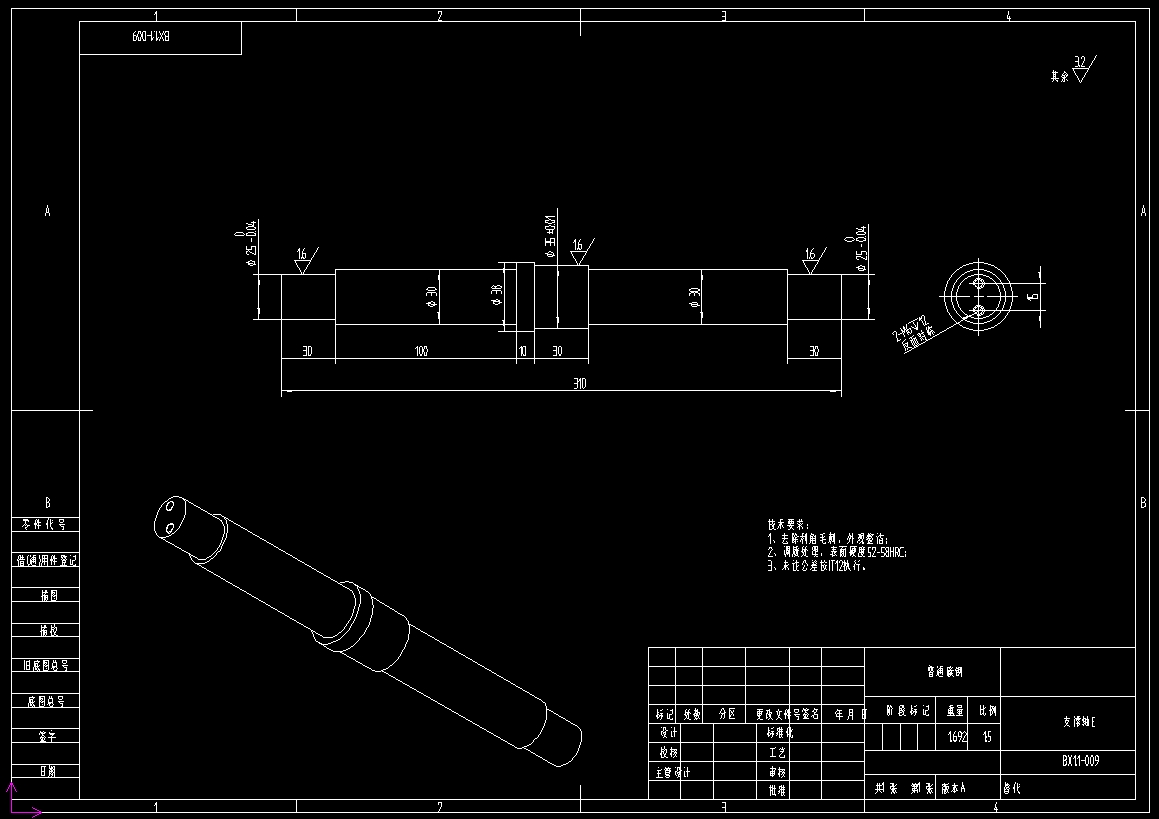
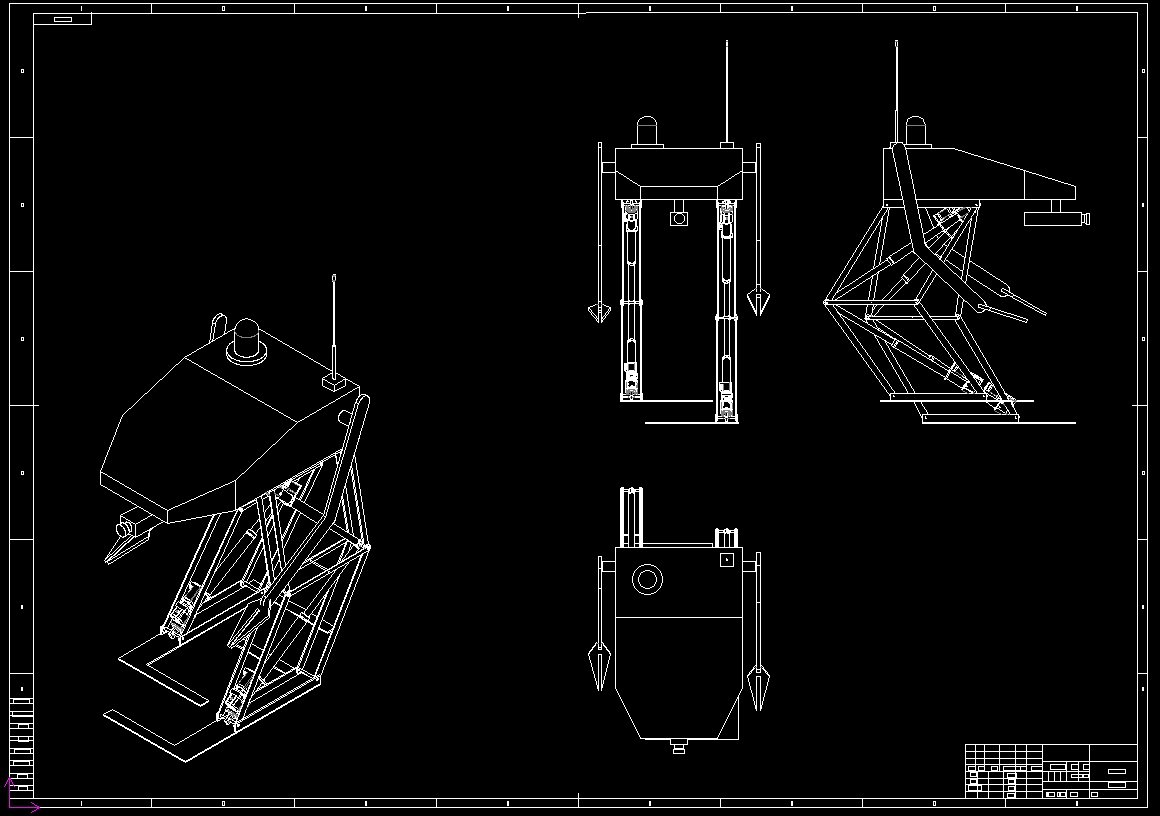
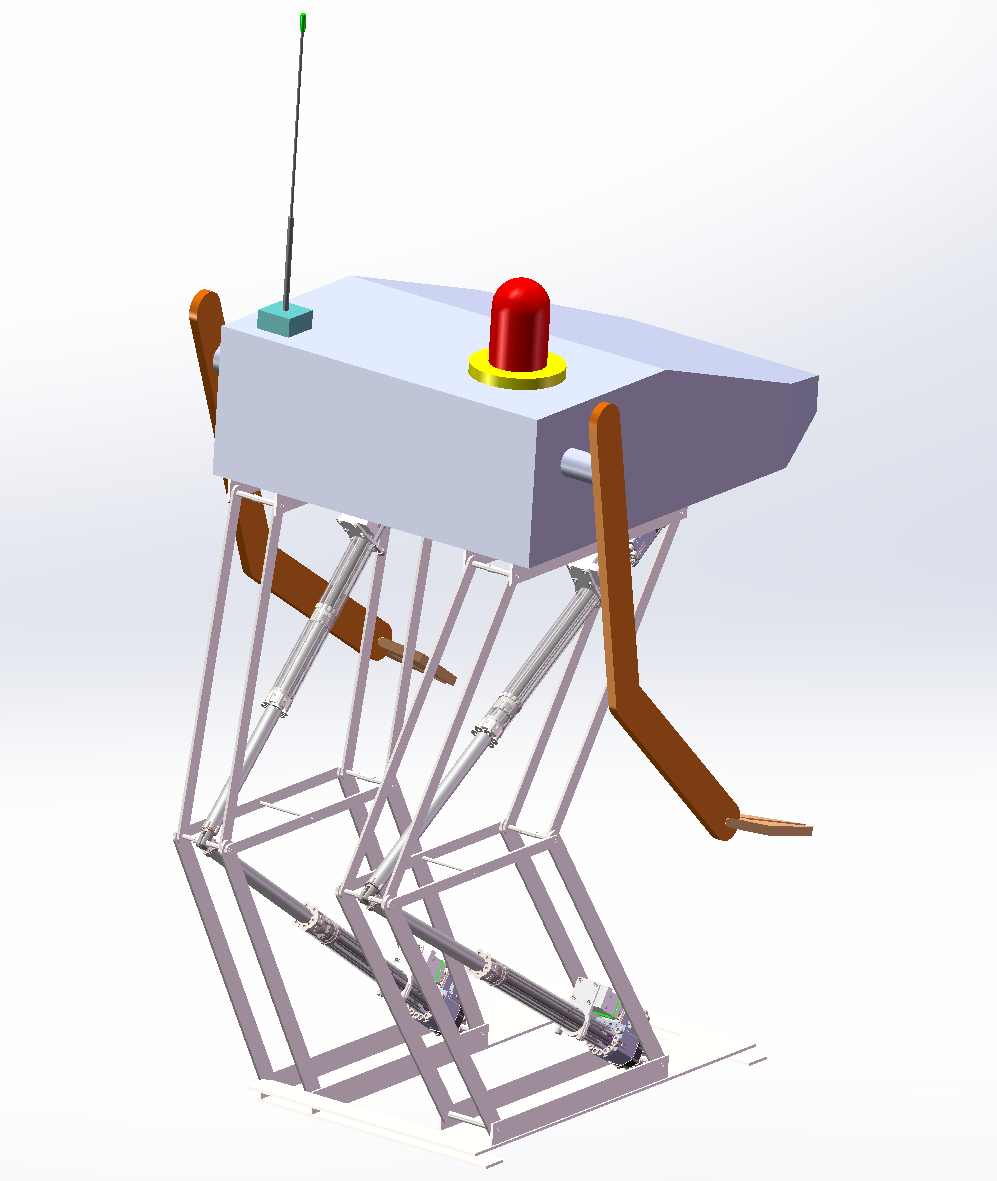
平行四边形双足步行机器人作为仿生机械领域的重要研究方向,其设计融合了机械结构优化与运动力学分析的双重挑战。该类机器人通过模仿人类双腿的平行四边形连杆机构,实现了步态的稳定传递与能量高效利用。其核心作用在于突破传统轮式或履带式机器人的地形适应性局限,能够在复杂环境如楼梯、沟壑等场景中完成自主移动。三维SolidWorks建模环节通过参数化设计手段,对腿部连杆、关节驱动模块及整体重心分布进行动态调整,确保结构强度与运动灵活性的平衡。CAD图纸则侧重于零件加工精度与装配关系的可视化表达,为后续实物组装提供精确的尺寸参照。
运动学分析是该机器人设计的关键环节。通过建立D-H坐标系模型,可推导出各关节角度与末端执行器位姿的映射关系,进而优化步态规划算法。例如,在支撑相与摆动相的转换过程中,需通过调整髋关节与膝关节的协同运动,避免出现机构死点或冲击载荷。动力学仿真则进一步验证了结构设计的合理性,通过计算惯性力与驱动扭矩的匹配关系,可显著缩短驱动元件的选型周期,同时降低能耗。
毕业论文部分系统梳理了平行四边形双足机器人的设计理论框架,涵盖机构选型依据、运动控制策略及实验验证方法。其中,对连杆长度比例、关节自由度分配等核心参数的敏感性分析,为设计优化提供了量化依据。运动仿真视频通过动态展示机器人的行走过程,直观呈现了步态稳定性与地面接触力的变化规律,辅助研究者快速定位设计缺陷。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
2D/3D/图纸
相关推荐
Y215玉米收割机割台的设计(论文+CAD图纸+开题报告+任务书+实习总结)
04/08
38
二级-带式运输机传动装置(二级展开式圆柱齿轮减速器)
04/11
46
数控机床上下料机械手设计(论文 CAD图纸 开题报告 液压图 PLC接线图)
04/01
37
反应釜设计说明说书
02/07
61
插秧机系统设计(论文+DWG图纸)
04/10
38
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn