数控机床上下料机械手是现代制造领域中实现自动化加工的关键设备,其核心作用在于替代人工完成重复性高、劳动强度大的上下料任务,提升加工效率与精度。该机械手通过精准的定位与抓取动作,将待加工工件从存储区转移至机床工作台,加工完成后再将成品放回指定位置,实现全流程无人化操作。这一设计不仅降低了人力成本,更避免了人工操作可能引发的定位误差与安全隐患,为高精度加工提供了可靠保障。
在机械手设计过程中,开题报告需明确研究目标与技术路线,梳理机械结构、驱动方式与控制逻辑等关键模块。例如,机械结构需根据工件尺寸与重量设计夹爪形式,确保抓取稳定性;驱动系统则需结合液压或电动方案,平衡动力输出与能耗控制。开题阶段的系统规划为后续设计奠定了理论基础,避免因目标模糊导致返工。
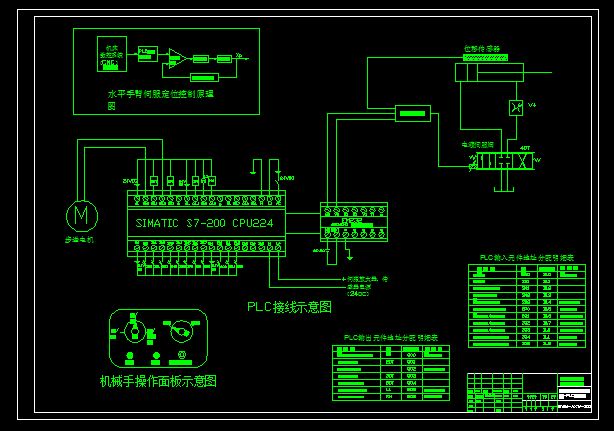
液压图与PLC接线图是机械手实现功能的核心载体。液压图通过符号标注液压元件的连接关系,清晰展示油路走向与压力控制逻辑,为液压系统调试提供直观依据;PLC接线图则定义了传感器、电磁阀与控制器之间的信号交互,确保机械手能根据预设程序完成动作切换。这两类图纸的准确性直接影响机械手的运行稳定性,需通过反复校核避免线路错接或信号干扰。
CAD图纸作为设计成果的数字化呈现,需包含机械手各部件的详细尺寸与装配关系。从底座的固定方式到夹爪的开合角度,每一处细节均需通过三维建模与二维工程图双重验证,确保零件加工后能精准组装。图纸的规范性还能显著缩短设计周期,避免因尺寸冲突导致的修改延误。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。