工业机器人的结构设计
内容
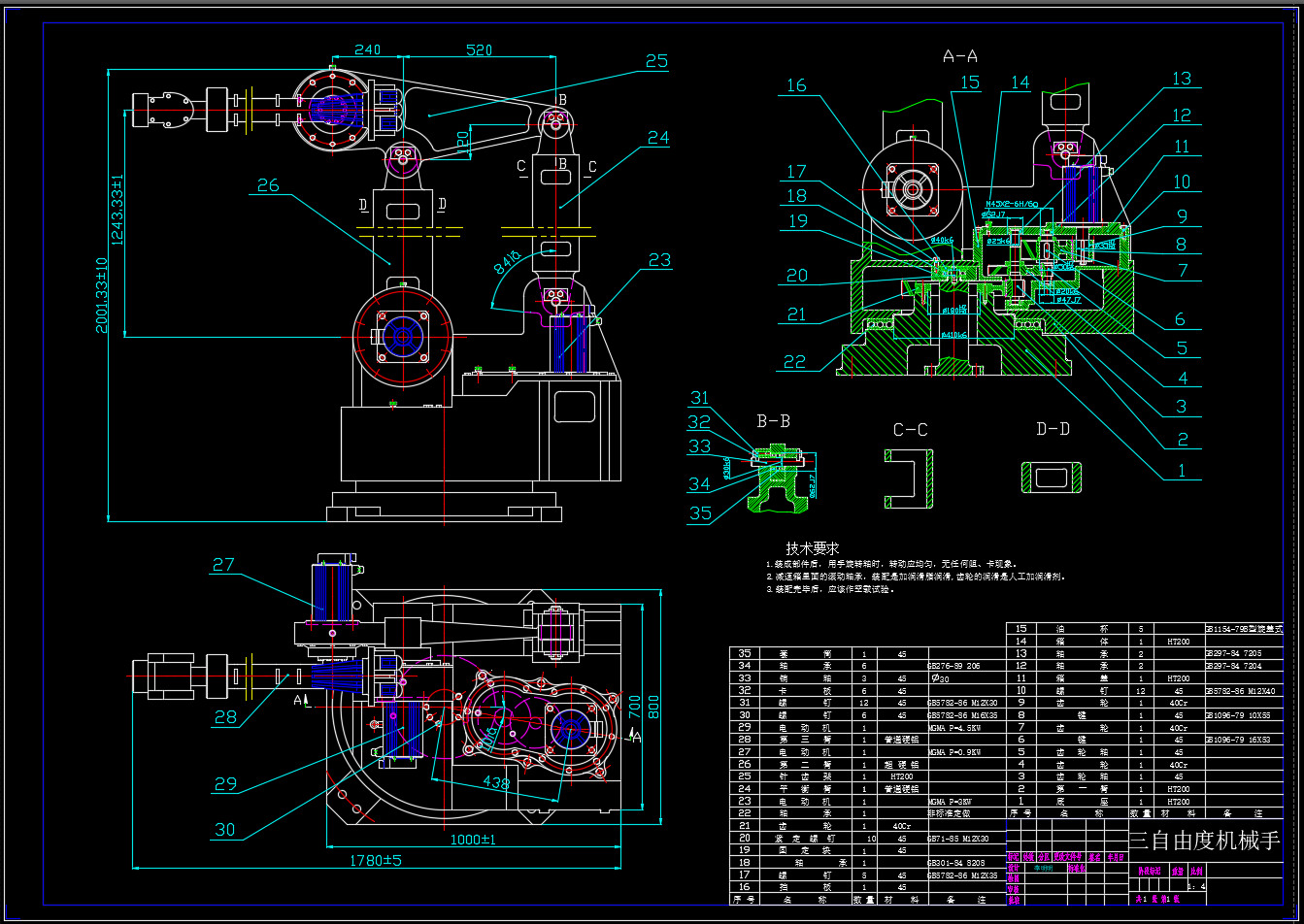
工业机器人的结构设计,是连接机械性能与功能需求的核心纽带。其核心作用在于通过科学布局机械部件,确保机器人能在复杂环境中稳定运行。例如,机械臂的关节设计需兼顾刚性与灵活性,既要承受载荷,又要实现精准转向;底座结构则需平衡重心,避免因重心偏移导致倾覆。这些设计细节直接影响机器人的负载能力、运动精度及使用寿命,是工业场景中替代人工完成重复性、高精度任务的基础。
结构设计还需考虑模块化与可扩展性。通过标准化接口设计,不同功能模块(如末端执行器、传感器)可快速更换,适应多任务需求。例如,焊接机器人与搬运机器人的机械臂主体结构相似,仅需调整末端夹具即可切换功能。这种设计思路显著缩短了从研发到应用的周期,同时降低了维护成本,为中小企业提供了灵活的解决方案。
材料选择与结构优化是提升性能的关键。高强度轻质合金的应用,可在保证结构强度的同时减轻自重,降低能耗;而拓扑优化技术则通过计算机模拟,去除材料冗余部分,实现结构轻量化与力学性能的平衡。例如,某些工业机器人的机械臂采用空心结构,内部布置加强筋,既减轻了重量,又避免了应力集中导致的断裂风险。
此外,结构设计需兼顾人机协作的安全性。通过圆角处理、增加防护罩等设计,减少机器人运动时对操作人员的潜在伤害;同时,优化机械臂的运动轨迹规划,避免与周围设备或人员发生碰撞。这些细节不仅提升了操作安全性,也拓展了机器人在柔性制造场景中的应用范围。
本文仅为简要介绍,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













