多旋翼课程一(四旋翼飞行器结构和原理)设计
内容
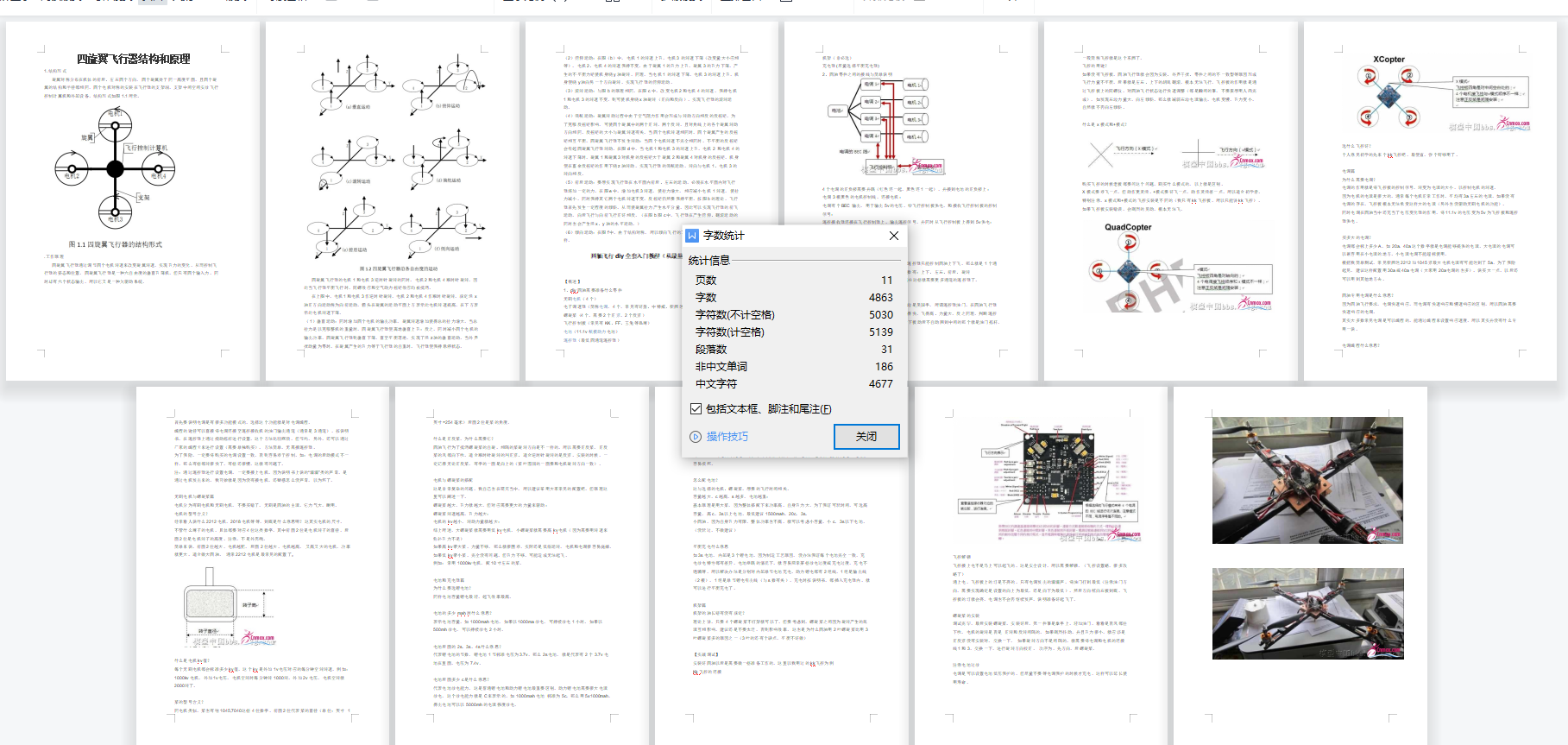
四旋翼飞行器作为多旋翼飞行器的典型代表,其结构设计直接决定了飞行性能的稳定性。四个旋翼对称分布在机臂末端,通过调整电机转速实现垂直起降、悬停及灵活转向。这种布局不仅简化了机械结构,更通过差速控制原理,让飞行器在三维空间内实现精准位移——当对角线上的两个旋翼加速、另外两个减速时,机身便会产生倾斜,进而产生水平方向的推力。这种动态平衡机制,是四旋翼飞行器区别于固定翼飞行器的核心特征。
从结构组成看,四旋翼飞行器主要由机架、动力系统、飞控系统及能源模块构成。机架作为承载平台,需兼顾强度与重量,通常采用碳纤维或航空铝合金材料;动力系统包含电机、电调与螺旋桨,电机转速的实时调节是飞行控制的基础;飞控系统通过传感器采集姿态数据,经算法处理后输出控制指令,确保飞行器在风扰或负载变化时仍能保持稳定;能源模块则以锂电池为主,其能量密度直接影响续航时间。各模块间的协同工作,构成了飞行器从静态到动态的完整控制链。
四旋翼的飞行原理基于牛顿第三定律与角动量守恒定律。当四个旋翼同时加速时,产生的反作用力使飞行器垂直上升;若仅增加某一侧旋翼转速,机身会因受力不均而旋转,通过调整对角旋翼的转速差,即可实现偏航控制。这种控制方式无需复杂的机械传动结构,显著降低了系统复杂度,同时通过电子调速器(ESC)的快速响应,使飞行器具备极高的机动性,甚至能在狭小空间内完成复杂动作。
实际应用中,四旋翼飞行器的结构设计需平衡多重因素。例如,机臂长度会影响螺旋桨效率与整体稳定性,过短可能导致桨间气流干扰,过长则会增加转动惯量;电机与电调的匹配需考虑功率余量,避免长时间高负载运行导致过热;飞控系统的传感器布局需优化,以减少振动对数据精度的影响。这些细节的优化,直接决定了飞行器的可靠性与适用场景。
本文仅为简要介绍,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













