并联六自由度微动机器人机构设计(说明书+CAD装配图、零件图+开题报告+任务书)
内容
并联六自由度微动机器人机构,是精密加工与微纳操作领域的关键设备,其核心作用在于通过多支链协同运动,实现末端执行器在空间六个自由度(X/Y/Z轴平移及绕三轴旋转)上的微米级定位与姿态调整。相较于传统串联机构,该设计通过并联结构将驱动单元布置于基座,显著提升了系统刚度与动态响应能力,同时减少了运动累积误差,尤其适用于半导体芯片封装、光学元件调校、生物细胞操作等对精度要求严苛的场景。
设计过程中,需重点攻克两大技术难点:一是支链拓扑优化,需通过运动学分析确定合理的杆长比例与铰链布局,确保机构在全工作空间内无奇异位形;二是微位移驱动单元选型,需综合考量分辨率、负载能力与响应速度,通常采用压电陶瓷或音圈电机等高精度驱动器,配合柔性铰链实现无间隙传动。此外,末端执行器的设计需根据具体应用场景定制,例如光学调校需集成高精度力传感器,生物操作则需配备微型夹持器或微针。
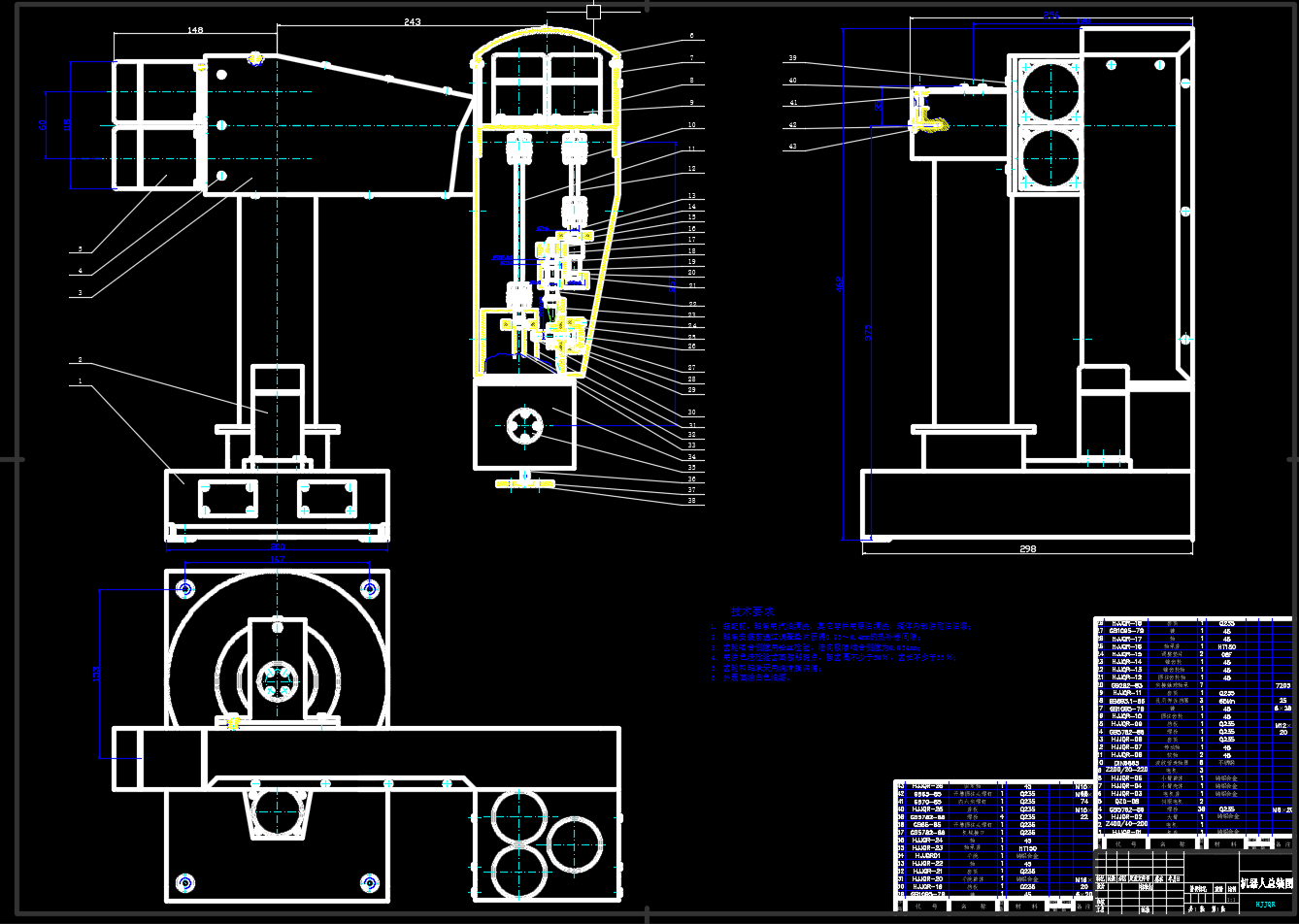
配套的CAD装配图与零件图需清晰标注各部件的装配关系与关键尺寸公差,例如支链与基座的连接方式、柔性铰链的厚度控制等,这些细节直接影响机构的运动精度与寿命。开题报告则需明确研究目标与技术路线,例如通过虚拟样机技术验证运动学模型,或通过实验对比不同支链构型的性能差异。任务书则需细化设计节点,如支链拓扑优化、驱动单元选型、样机装配调试等阶段的时间分配与交付成果。
本文仅为简要介绍,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













