搬运机械手的设计(气动机械手的设计)全套毕业设计
内容
在工业自动化领域,搬运机械手的设计是提升生产效率的关键环节。其中,气动机械手凭借结构简单、动作可靠、成本低廉等优势,成为中小型生产线及重复性作业场景的理想选择。其核心作用在于替代人工完成物料抓取、搬运、定位等任务,通过气动驱动系统实现快速响应与精准控制,显著缩短作业周期,降低人力成本与劳动强度。
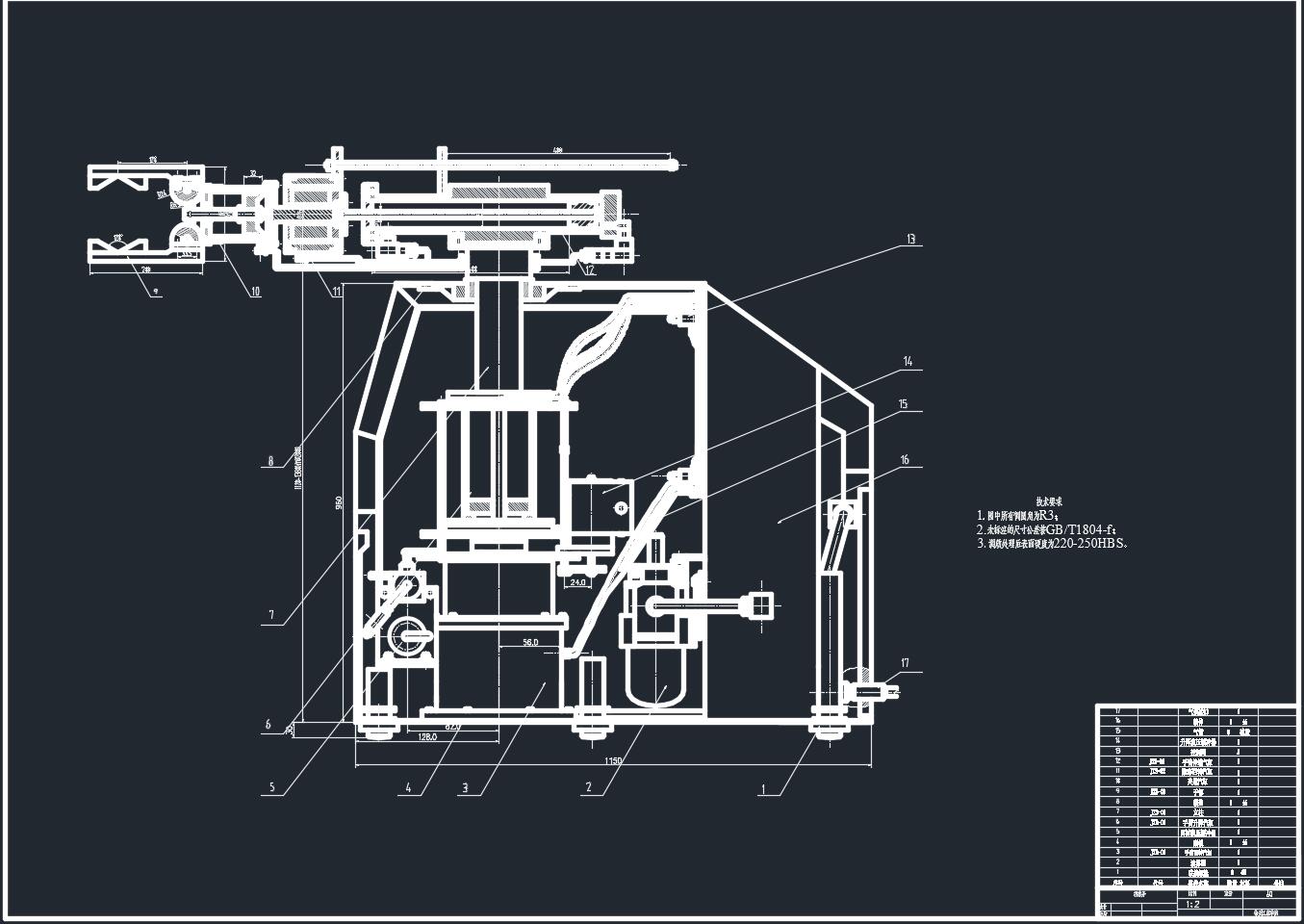
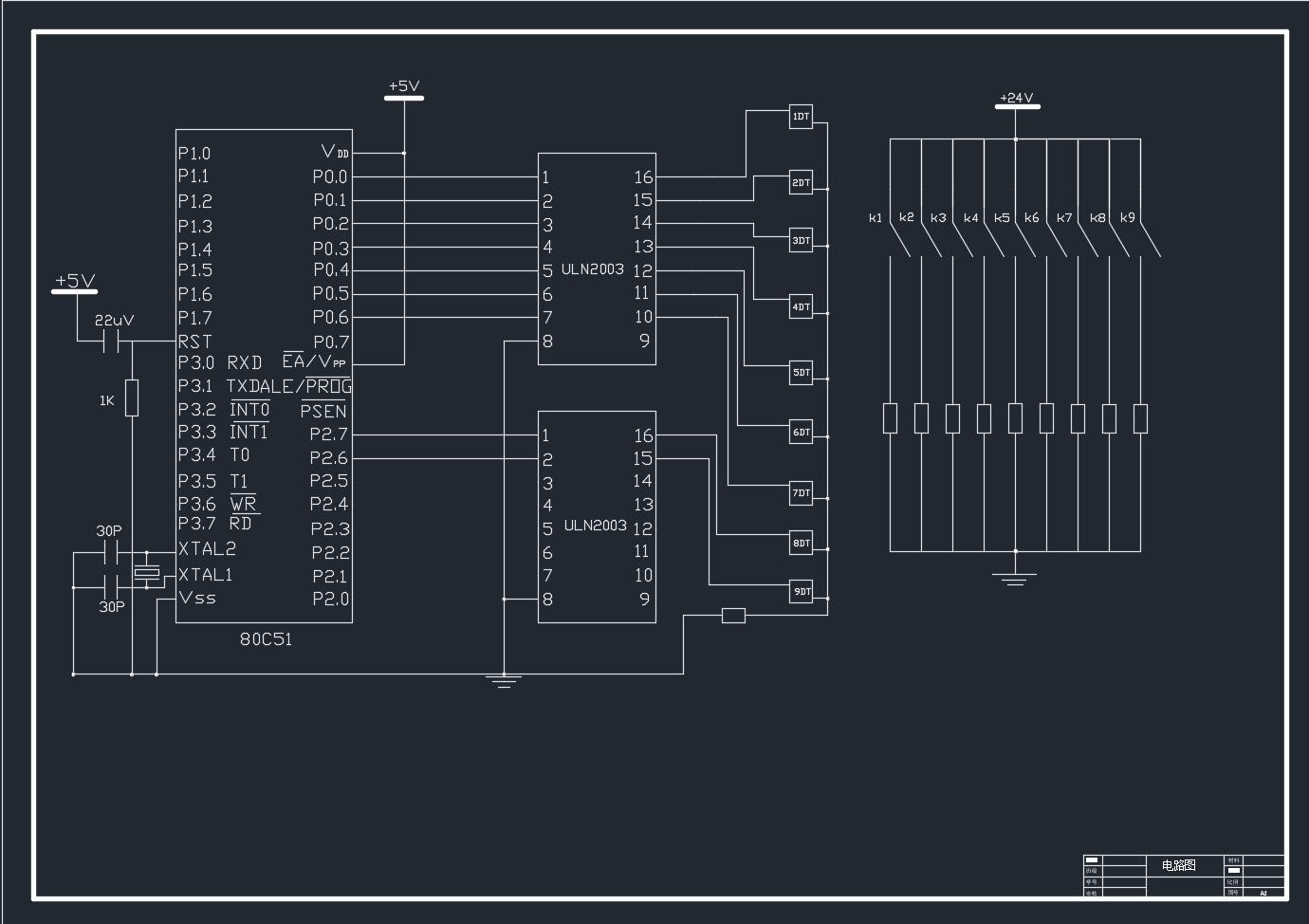
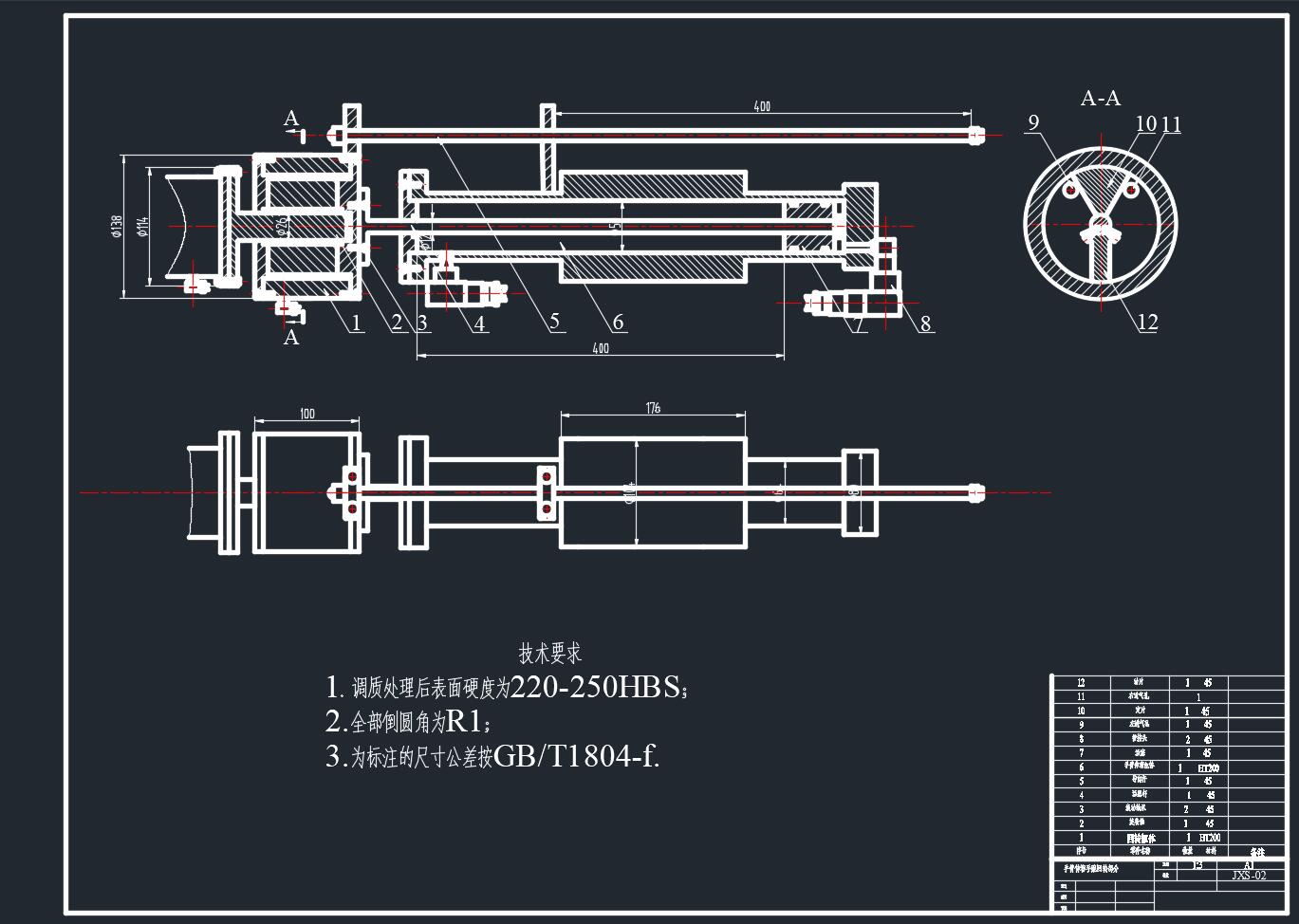
气动机械手的设计需围绕气源系统、执行机构与控制系统三大模块展开。气源系统通过空气压缩机提供稳定压力,经干燥、过滤后输送至气缸,确保动力输出的连续性;执行机构包含手指气缸、旋转气缸与直线气缸,分别实现抓取、旋转与平移动作,各气缸通过电磁阀切换气路,完成多自由度组合运动;控制系统则通过PLC或继电器逻辑编程,协调各气缸动作时序,确保机械手按预设路径完成作业流程。
设计过程中需重点考虑机械手的负载能力与运动范围。手指气缸的夹持力需根据物料重量与形状定制,避免因夹持力不足导致脱落或因过大造成损伤;旋转气缸的转角范围需覆盖目标工位的定位需求,直线气缸的行程则需匹配搬运距离,同时预留安全余量。此外,气动系统的密封性与管路布局直接影响稳定性,需通过优化气缸安装方式与减少管路弯折来降低压力损耗。
实际应用中,气动机械手可通过模块化设计快速适配不同场景。例如,更换手指气缸的夹爪类型即可适应箱体、圆柱体等多样物料;调整气缸安装角度可扩展作业空间;结合传感器反馈可实现简单的障碍避让功能。这种灵活性使其在电子装配、食品包装、物流分拣等领域得到广泛应用。
本文仅为简要介绍,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













