PLC控制机械手设计(论文+DWG图纸)
内容
在工业自动化领域,PLC控制机械手的设计是提升生产效率与操作精度的关键方案。其核心作用在于通过可编程逻辑控制器(PLC)实现机械手动作的精准控制,替代传统人工操作或继电器控制方式,显著降低人为误差与设备故障率。例如,在物料搬运场景中,PLC可根据预设程序协调机械手的抓取、移动与放置动作,确保各环节衔接流畅,同时通过传感器实时反馈位置、力度等数据,实现闭环控制,大幅提升系统稳定性。
设计过程中,PLC的选型需匹配机械手的负载能力与动作复杂度。对于轻型机械手,可选择紧凑型PLC以降低成本;若涉及多轴联动或高速响应需求,则需选用具备高速脉冲输出功能的型号。电气控制部分需合理规划输入/输出(I/O)点位,将机械手的限位开关、按钮指令等信号接入PLC输入模块,输出模块则连接电磁阀、电机驱动器等执行元件,形成完整的控制链路。
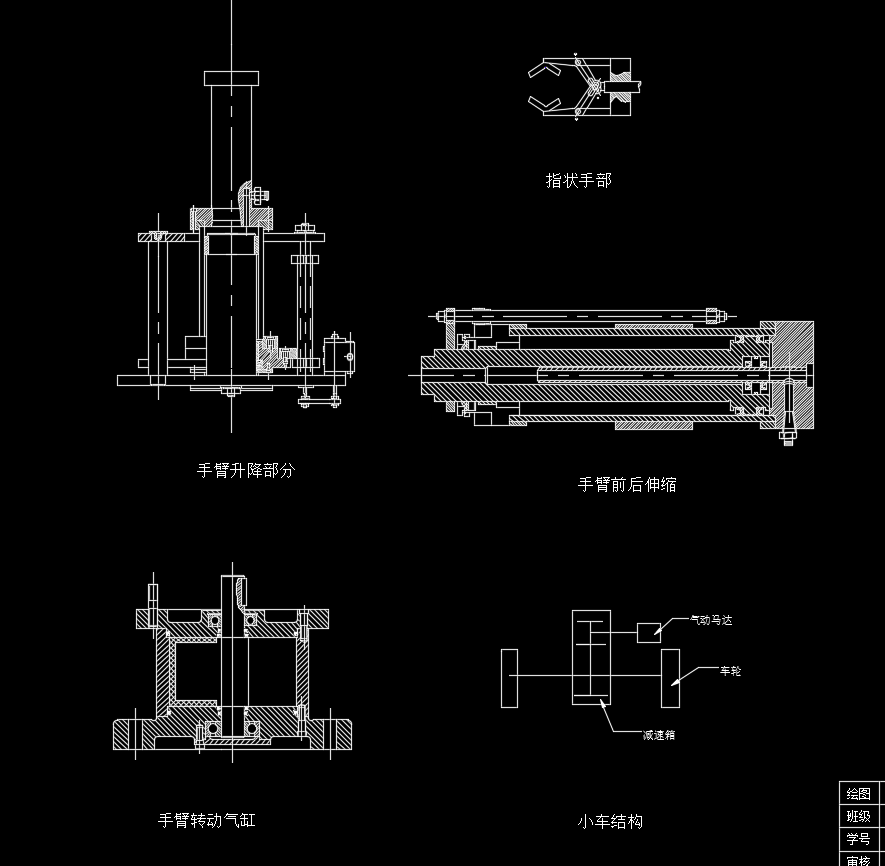
机械结构方面,机械手通常由底座、旋转关节、伸缩臂与末端执行器组成。PLC通过控制伺服电机或步进电机的转动角度,驱动各关节实现旋转、俯仰等动作,末端执行器则根据任务需求更换夹爪、吸盘等工具。为确保动作精度,需在关键部位安装编码器或光栅尺,将位置数据反馈至PLC,通过PID算法动态调整输出信号,消除累积误差。
在安全设计上,PLC可集成急停按钮、安全光幕等保护装置。当检测到异常情况时,PLC立即中断所有动作并触发报警,避免设备损坏或人员伤害。此外,通过编程可设置权限管理功能,限制操作人员对关键参数的修改,防止误操作引发风险。
本文仅为简要介绍,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。


评论













