可变车宽移动机器人的设计与研究【三维solidworls、CAD图纸、毕业论文、运动仿真视频】
内容
可变车宽移动机器人的设计聚焦于复杂环境下的灵活通行需求,通过机械结构创新实现车宽动态调整功能。该设计以模块化机械框架为核心,采用可折叠或伸缩式连接部件,使机器人能够在狭窄通道与开阔场地间快速切换工作模式。例如,在仓储物流场景中,机器人可根据货架间距自动收缩车体,减少转向半径;进入搬运区域后,车宽扩展可提升稳定性,避免货物倾倒风险。这种适应性设计显著提升了设备在多场景中的通用性,降低了因环境限制导致的作业中断概率。
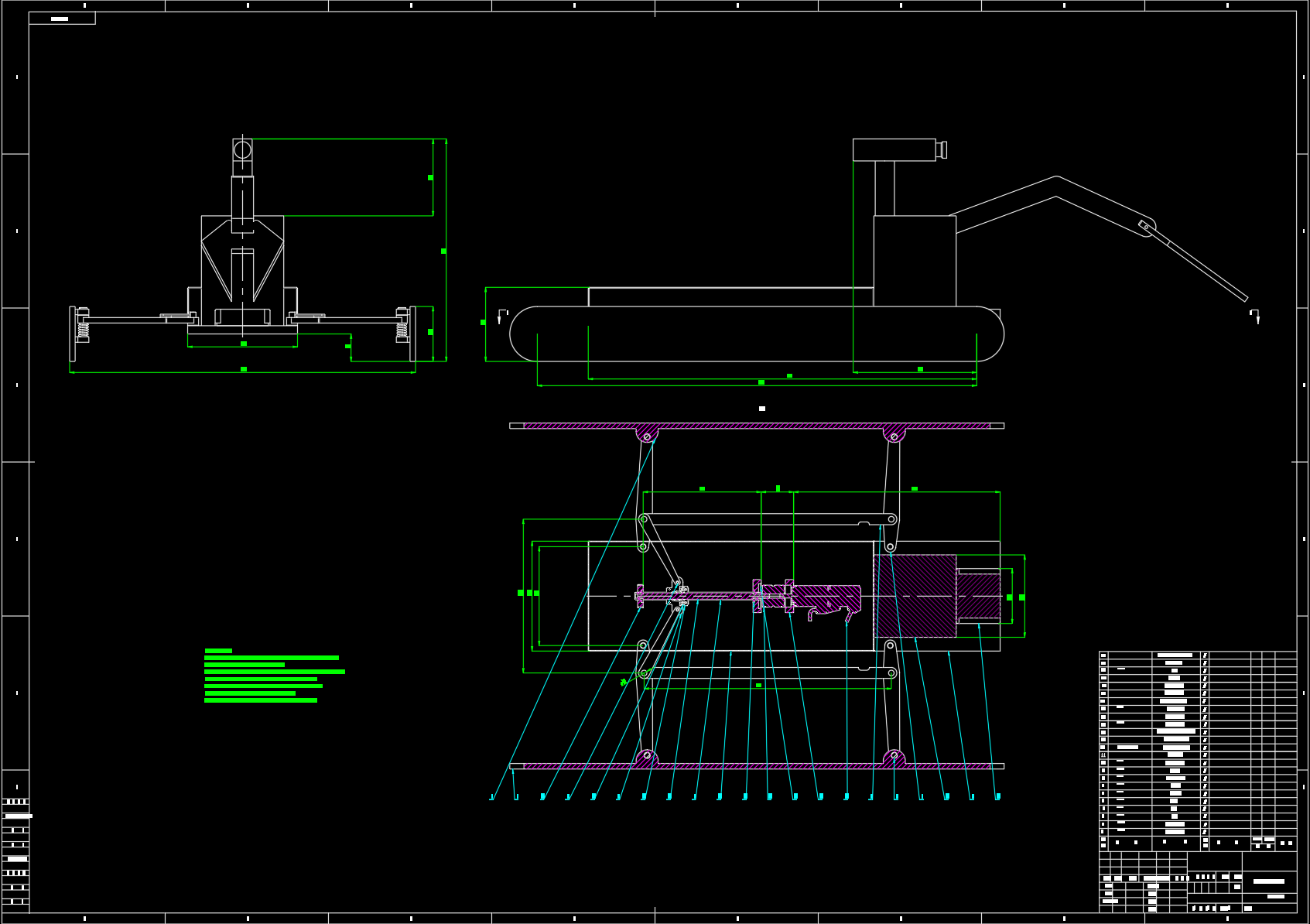
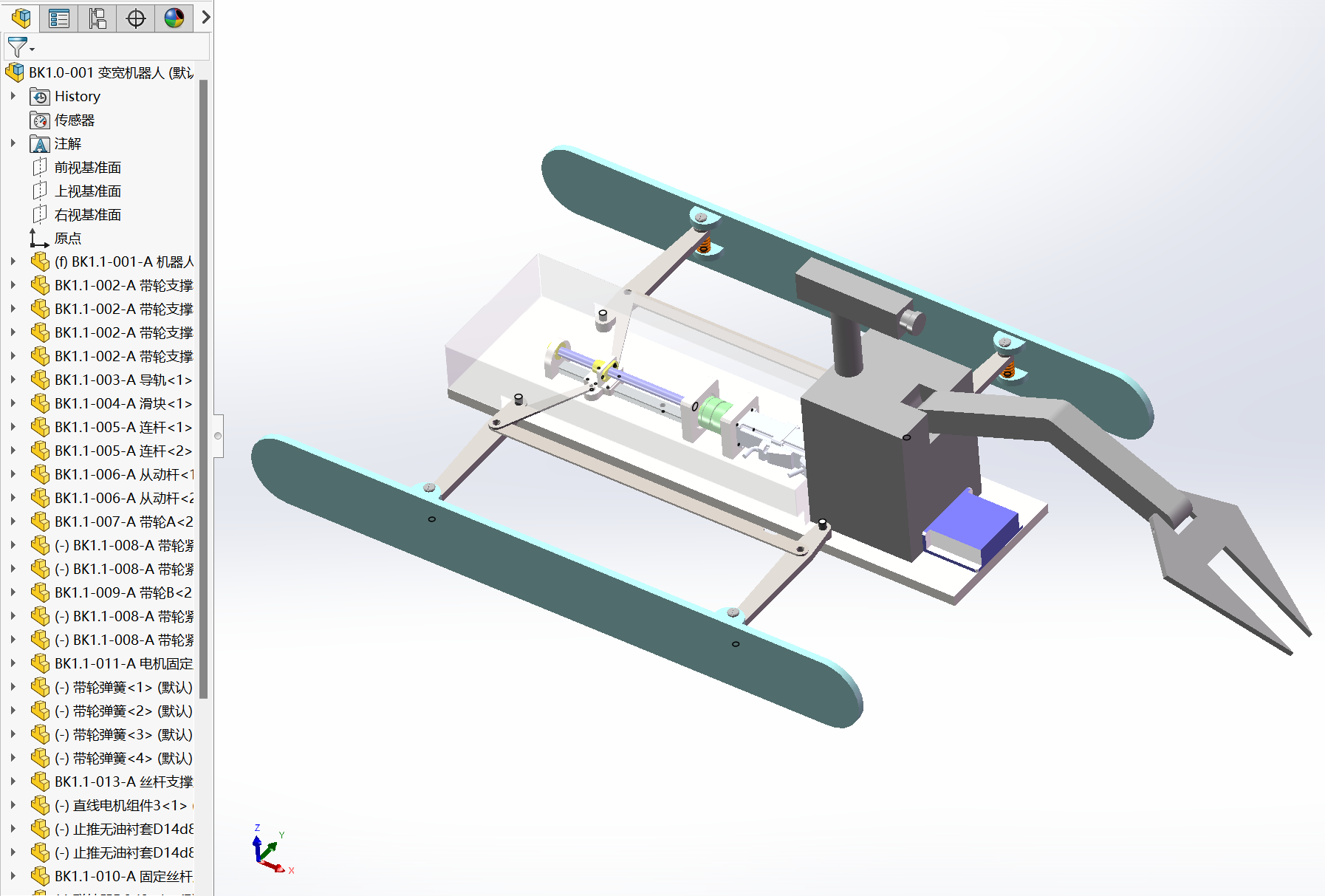
三维SolidWorks模型构建是该研究的关键环节。通过参数化建模技术,设计者能够精确模拟各部件的运动轨迹与干涉情况,提前优化机械结构。例如,对车宽调节机构进行虚拟装配时,可实时调整连杆长度与铰链位置,确保车体在收缩/扩展过程中保持平稳,避免因结构应力集中导致的变形问题。此外,CAD图纸的标准化输出为后续零件加工提供了清晰的技术指引,减少了因图纸歧义引发的返工风险。
毕业论文中详细论证了可变车宽机构的力学特性与控制逻辑。通过有限元分析验证了关键部件的强度,确保车体在动态调整过程中能承受额定载荷;同时,结合运动学方程推导,优化了驱动电机的选型与传动比,使车宽调节响应时间显著缩短。这些理论支撑为实际设计提供了科学依据,避免了经验主义导致的性能缺陷。
本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。


评论













