基于缩放机构的便携迎宾机器人的设计【solidworks+CAD+毕业论文+运动仿真视频】
内容
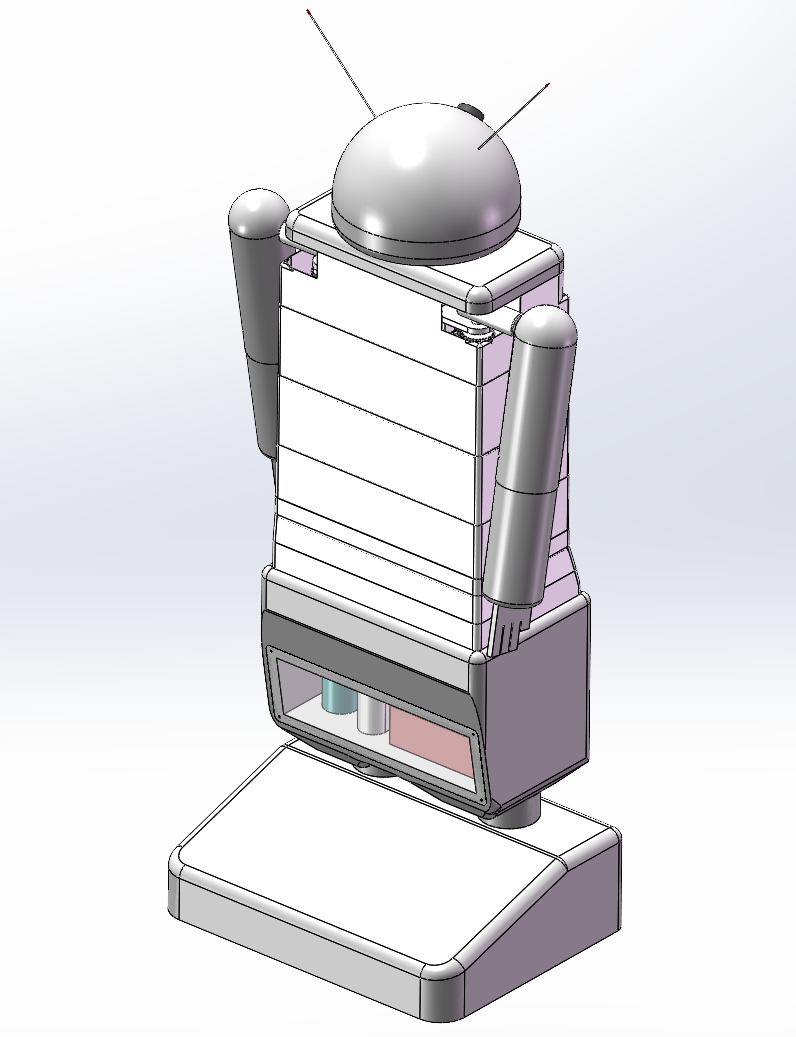
在商场、酒店等公共场所,迎宾环节的服务质量直接影响着顾客的第一印象。基于缩放机构的便携迎宾机器人,正是为解决传统迎宾方式灵活性不足、互动性单一等问题而设计。其核心在于通过机械结构的创新,实现迎宾功能的便携化与智能化,既能快速部署于不同场景,又能以动态展示吸引顾客关注,成为提升服务体验的创新工具。
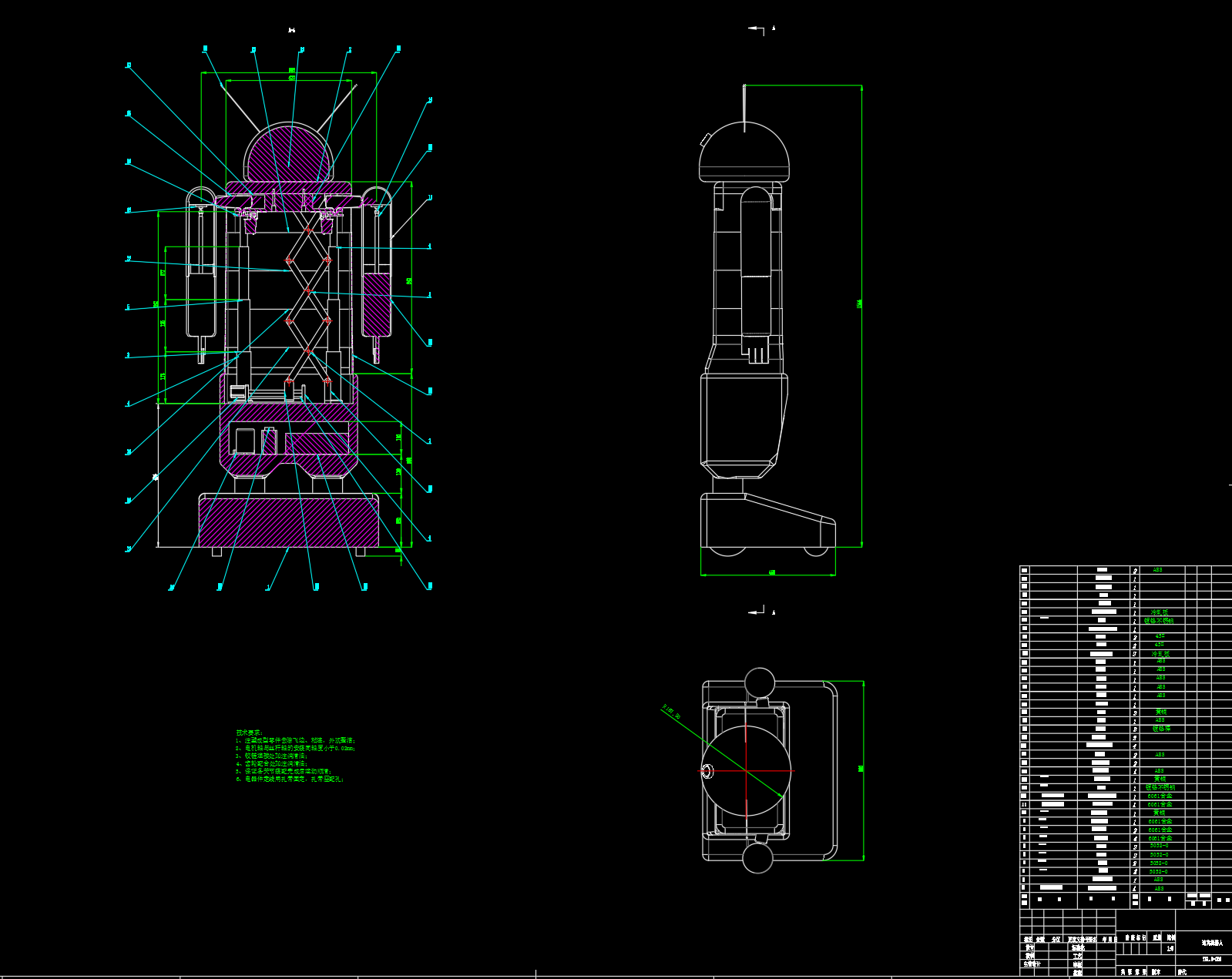
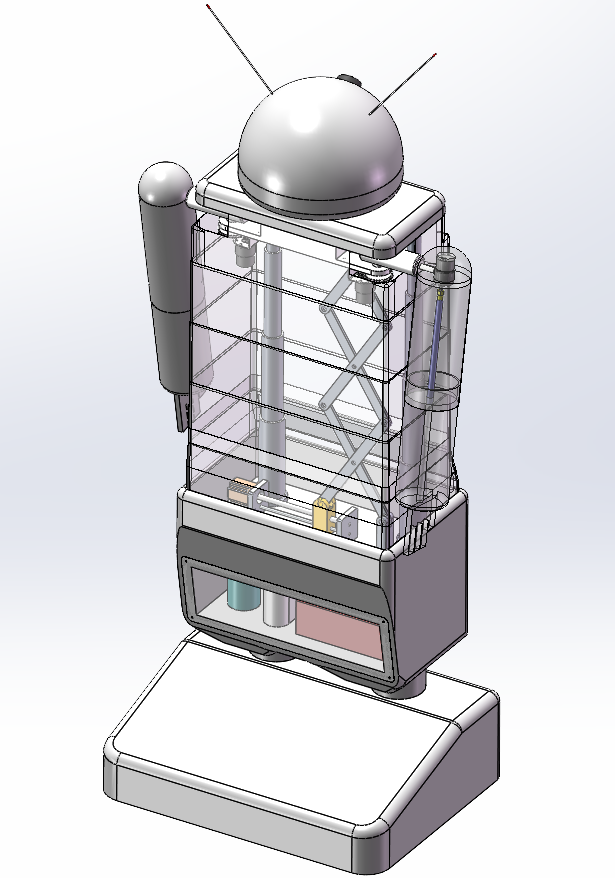
该设计以缩放机构为技术基础,通过连杆、滑轨等标准件的组合,构建出可折叠、易收纳的机械框架。当机器人处于工作状态时,缩放机构展开形成稳定的支撑结构,确保整体平衡;非工作状态时,框架收缩至紧凑形态,便于人工搬运或车载运输。这种设计显著降低了对固定安装位置的依赖,无论是临时活动还是长期布展,均能快速适应场地变化。
在三维建模阶段,SolidWorks软件发挥了关键作用。通过参数化设计功能,可灵活调整各部件的尺寸与连接关系,确保缩放机构在展开与收缩过程中无干涉、运动流畅。同时,利用装配体模块模拟实际使用场景,提前发现设计缺陷并优化结构布局,避免后期反复修改。例如,通过调整连杆长度与角度,使机器人重心始终保持在支撑面内,有效提升了稳定性。
CAD软件则用于细化二维工程图,明确各零件的加工要求与装配顺序。从零件的轮廓形状到孔位的定位尺寸,均以行业规范标注,确保加工精度符合设计预期。此外,通过分层标注与注释功能,将不同部件的加工信息清晰区分,为后续的组装与调试提供便利。
该设计通过模块化思路整合机械、电子与软件系统,显著缩短了从概念到落地的周期。缩放机构的标准化设计降低了零件数量,避免了过多复杂结构的堆砌,既提升了可靠性,又便于后期维护与升级。无论是小型商业空间还是大型活动现场,均能以灵活的姿态融入环境,成为提升服务品质的实用方案。
本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













