单自由度越障机器人的设计与研究【说明书+CAD+SOLIDWORKS+外文翻译】
内容
单自由度越障机器人作为特种场景下的关键装备,其核心作用在于通过简化机械结构实现高效越障能力。传统多关节机器人虽具备复杂地形适应能力,但存在控制复杂、能耗过高等问题。单自由度设计通过优化传动链与结构布局,将越障动作集中于单一运动维度,既降低了系统复杂度,又提升了能量利用效率,尤其适用于狭窄空间或资源受限环境下的作业需求。
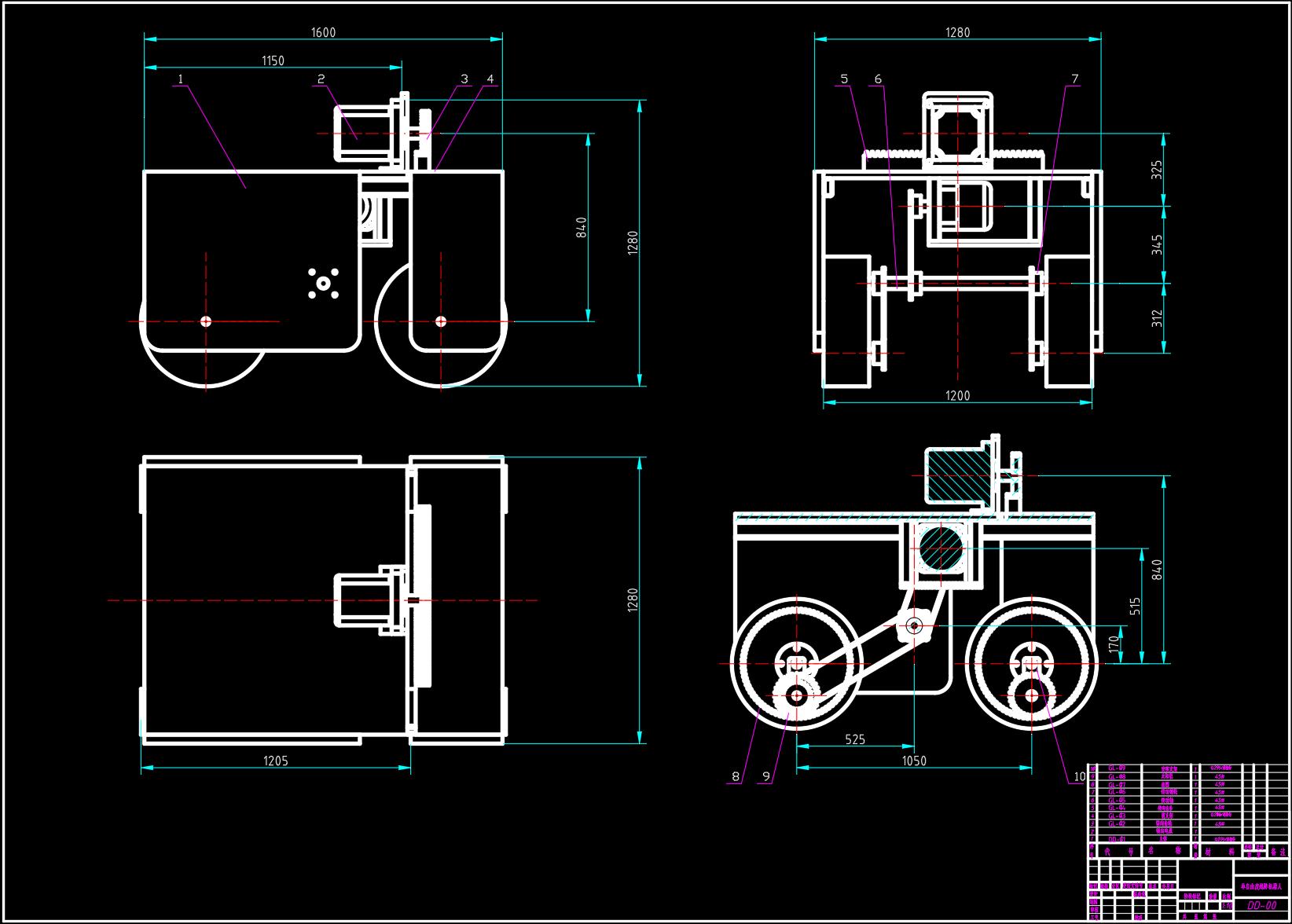
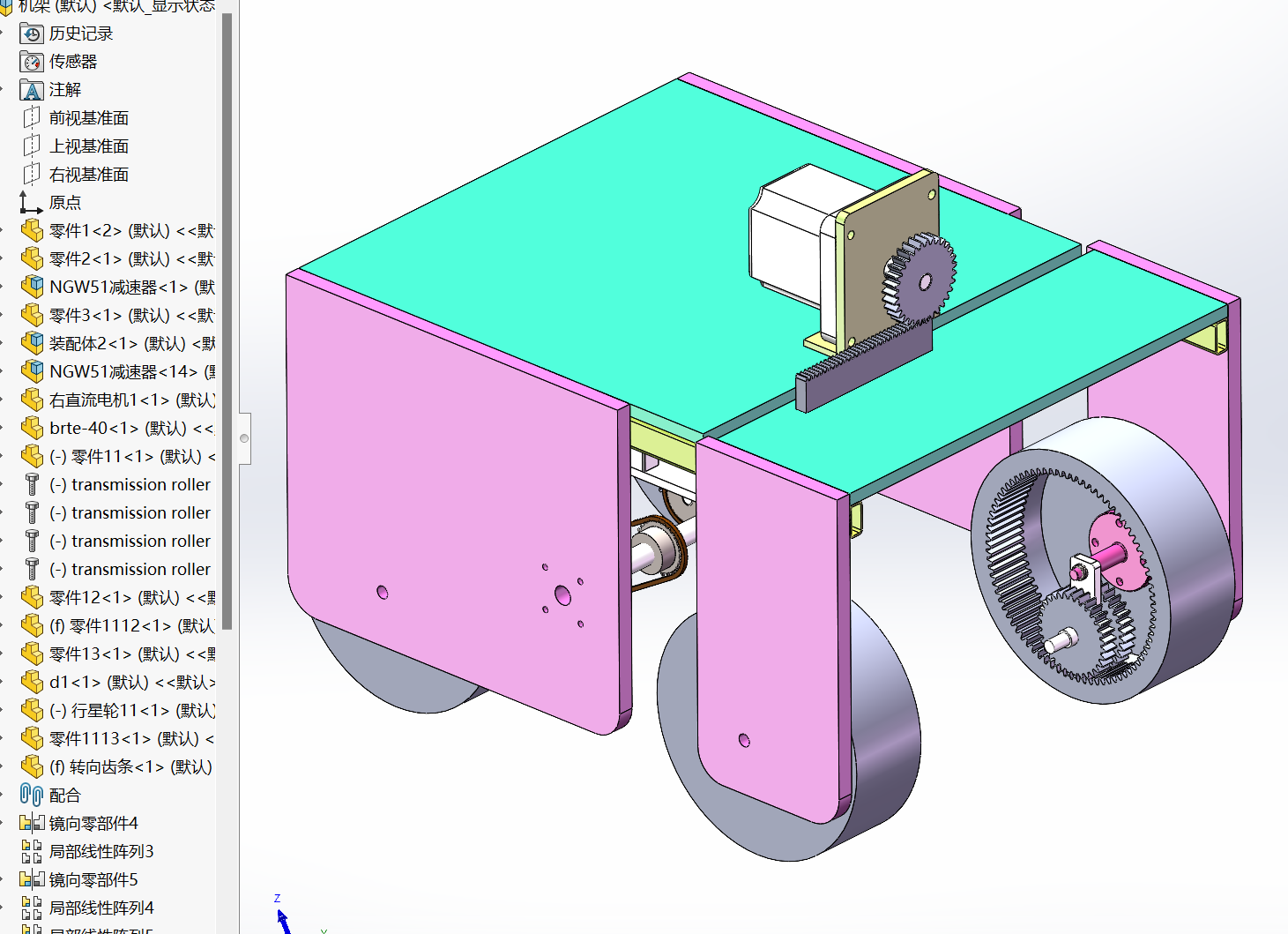
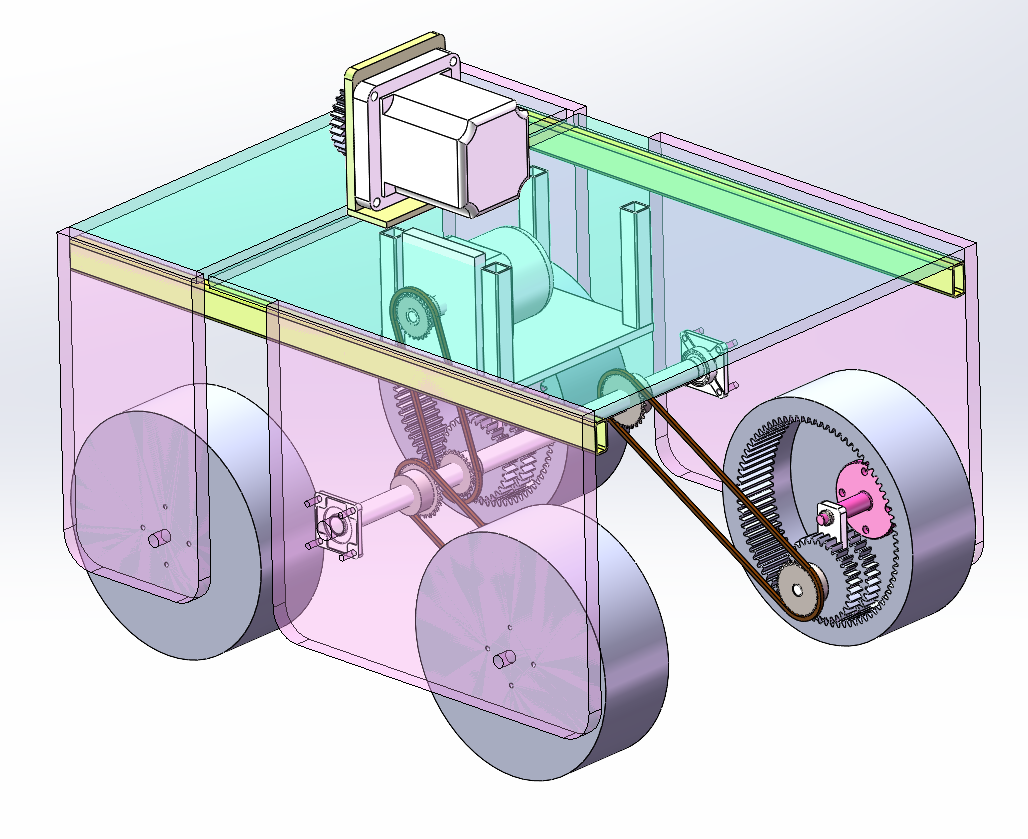
该机器人的结构设计聚焦于核心运动单元的可靠性。其主体框架采用高强度轻质材料,通过拓扑优化减少冗余结构,在保证承载能力的同时降低整体重量。关键传动部件采用模块化设计,通过标准化接口实现快速拆装与维护,显著缩短调试周期。轮-腿复合式末端执行器可根据地形自动切换运动模式,平地行驶时采用轮式结构提升速度,越障时切换为腿式结构增强通过性,兼顾效率与适应性。
配套学习资料包含详细设计说明书、CAD工程图及SOLIDWORKS三维模型。设计说明书系统阐述机械原理、材料选型及装配工艺,为理解设计逻辑提供理论支撑;CAD工程图以工程标准绘制,标注关键尺寸与公差要求,便于进行结构验证;SOLIDWORKS模型支持多角度观察与局部拆解,直观展示各部件的装配关系与运动逻辑。外文翻译部分精选国际权威期刊论文,涵盖单自由度机构优化、轻量化设计等前沿研究方向。
实际应用中,该设计通过减少运动自由度降低了控制系统的开发难度,传感器与执行器的配置也更为精简,有效控制了硬件成本。模块化设计理念使得用户可根据具体需求调整部件参数,例如更换不同尺寸的轮-腿组件以适应不同高度的障碍物,或调整传动比以优化运动速度与扭矩输出。这种灵活性为个性化定制提供了技术基础。
本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













