送料机械手设计(总装图,部装图,5个零件图,设计说明书)
内容
送料机械手作为自动化产线中的关键设备,其核心作用在于实现物料的精准抓取、稳定搬运与高效定位,替代人工完成重复性高、劳动强度大的作业环节。通过机械结构与传动系统的协同设计,该设备可显著缩短物料周转时间,提升生产流程的连续性与稳定性,尤其适用于批量加工场景中的上下料环节。其设计需兼顾刚性与轻量化,确保在高负载工况下仍能保持低振动、低能耗运行,同时通过模块化布局降低后期维护难度。
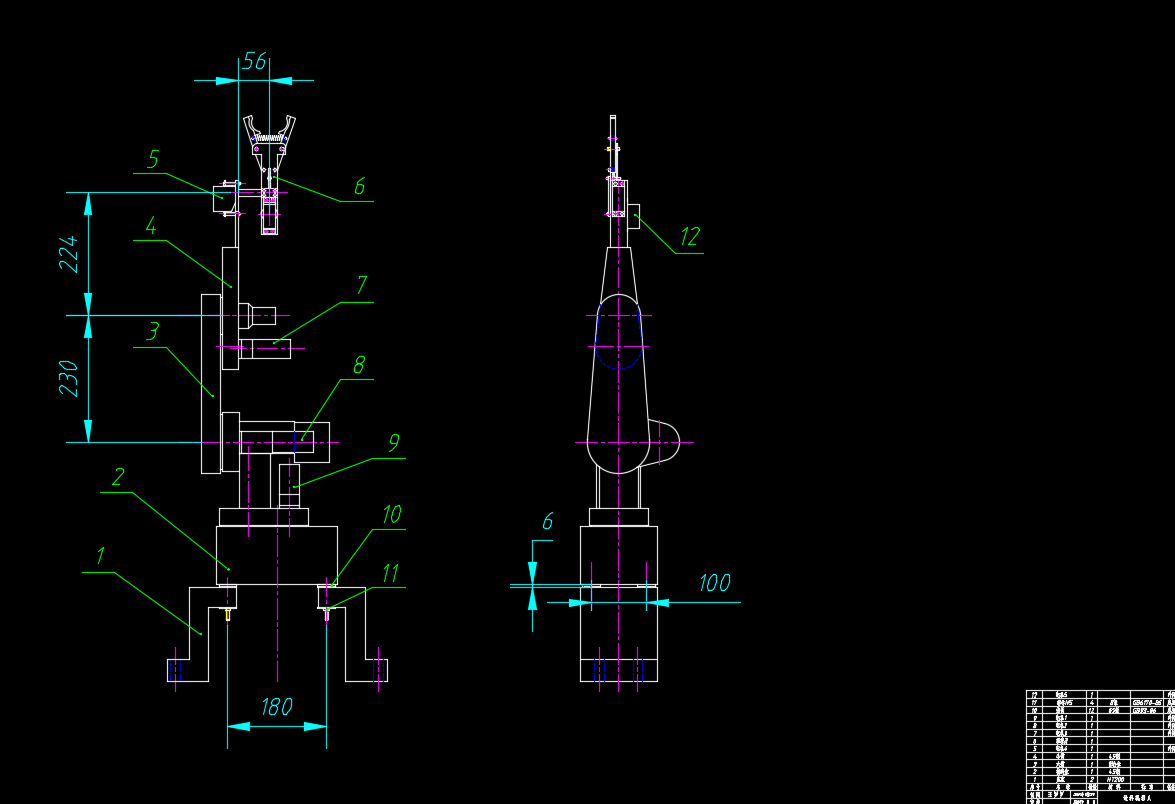
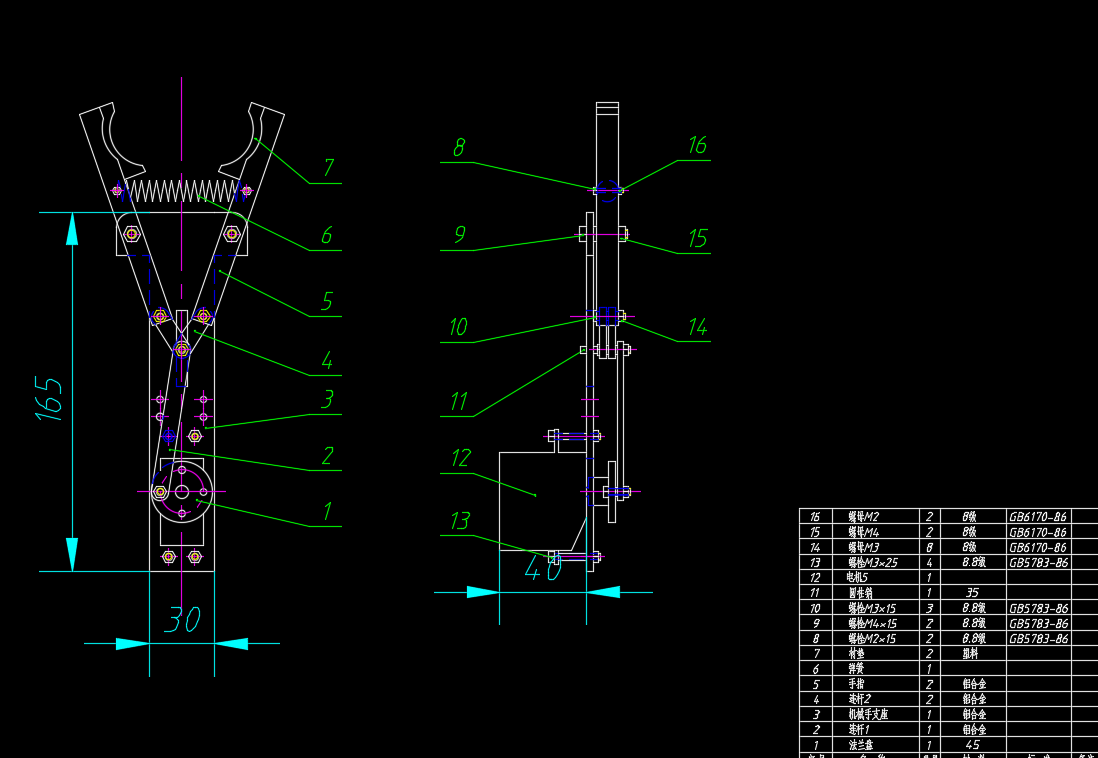
总装图作为设计的顶层文件,需清晰标注机械手的整体结构、各部件相对位置及装配关系。通过三维建模与二维投影结合的方式,可直观呈现机械臂、驱动装置、末端执行器等核心模块的集成方式,并为部装图提供设计基准。部装图则聚焦于关键子系统的分解设计,例如传动轴系的装配流程、气动元件的布局优化等,通过分层展示确保各部件的加工精度与装配顺序符合设计要求。
零件图是机械手制造的核心依据,需涵盖机械臂、齿轮、连杆、轴承座等关键部件的详细尺寸、公差要求及表面处理工艺。例如,机械臂需采用高强度合金材料以承受弯曲载荷,齿轮需通过热处理提升耐磨性,连杆需设计减重孔以平衡强度与重量。这些零件的精度直接决定机械手的运动平稳性与定位准确性,因此需在图纸中明确标注形位公差与检测基准。
设计说明书需系统阐述设计思路、选型依据及验证方法。从需求分析出发,明确机械手的负载能力、运动范围、定位精度等核心指标;通过理论计算确定驱动功率、传动比等关键参数;结合有限元分析优化结构强度,避免应力集中导致的疲劳破坏。此外,说明书还需包含装配工艺规范与调试要点,指导用户完成设备的安装与运行测试。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













