平面关节型机器人--(图纸+说明书)
内容
平面关节型机器人作为工业自动化领域的“多面手”,凭借其紧凑的结构与灵活的运动特性,在装配、搬运、检测等场景中发挥着关键作用。其核心设计理念是通过多个旋转关节的协同,实现末端执行器在平面内的精准定位与定向,尤其适用于对空间要求严苛、重复性操作频繁的作业环境。与传统机械臂相比,这类机器人通过优化关节布局显著减少了运动干涉,同时降低了对安装场地的依赖,成为中小型制造企业提升效率的理想选择。
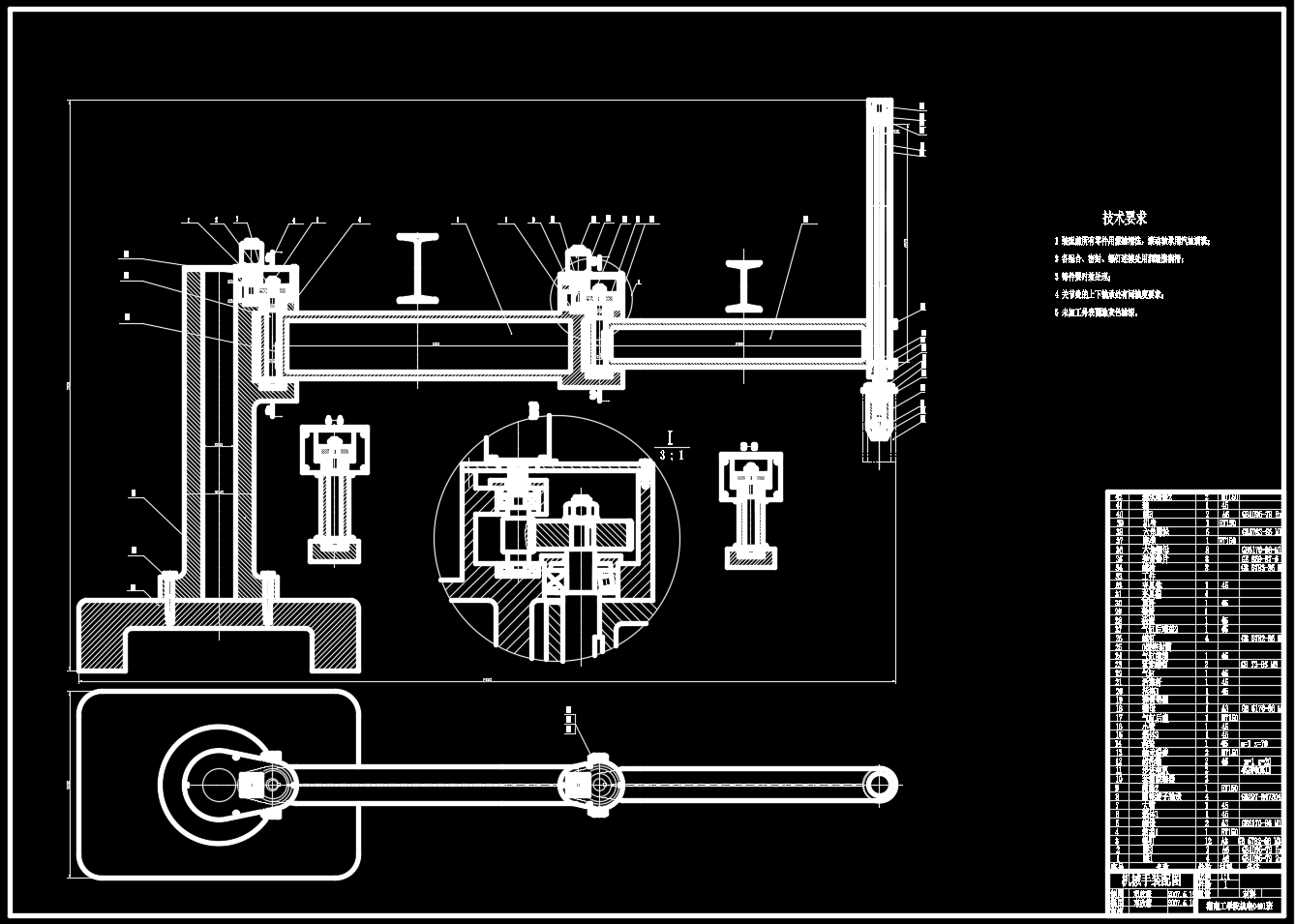
图纸部分详细标注了机器人的机械结构与装配关系,涵盖底座、关节臂、驱动模块及末端连接件等核心组件。各部件采用模块化设计,既便于单独调试,也支持快速更换以适应不同任务需求。例如,关节臂通过高强度铝合金与工程塑料的复合应用,在保证结构刚性的同时减轻了整体重量;驱动模块则集成伺服电机与减速器,通过精密传动实现毫米级定位精度。图纸中还特别标注了关键尺寸的公差范围,为实际加工与装配提供了明确指导。
说明书则围绕机器人的操作逻辑展开,从硬件接线到软件参数配置均有详细说明。针对用户关心的运动规划问题,文档提供了基于坐标系的路径生成方法,并列举了常见工况下的优化策略。例如,在高速搬运场景中,通过调整加速度曲线可有效减少振动;在精密装配任务中,则需优先保证轨迹的平滑性。此外,说明书还包含故障诊断与维护指南,帮助用户快速定位问题并恢复设备运行。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













