喷涂机器人的全套设计(说明书+CAD图纸)
内容
喷涂机器人作为现代工业涂装领域的核心设备,其设计需兼顾机械结构、运动控制与涂装工艺的协同优化。其核心作用在于通过高精度机械臂实现复杂曲面均匀喷涂,替代传统人工操作,显著提升涂层质量稳定性,同时降低涂料浪费与作业环境风险。机械臂采用多关节串联结构,通过精密传动系统确保末端执行器在三维空间内灵活定位,配合专用喷枪实现涂料流量、雾化压力的精准调控,满足不同工件的涂装需求。
设计过程中,机械结构需重点考虑刚度与轻量化的平衡。臂体采用高强度铝合金或碳纤维复合材料,通过拓扑优化减少冗余质量,同时通过有限元分析验证关键部件的应力分布,确保长期运行无变形。传动系统多选用谐波减速器与伺服电机组合,兼顾高精度定位与低背隙特性,避免喷涂过程中因机械振动导致的涂层厚度不均。
控制系统是喷涂机器人的“大脑”,其设计需集成路径规划、速度控制与故障诊断功能。通过离线编程软件生成喷涂轨迹,结合传感器实时反馈调整喷枪姿态,确保复杂曲面覆盖无死角。安全模块则通过区域光栅与急停按钮实现双重防护,避免人员误入作业区引发事故。
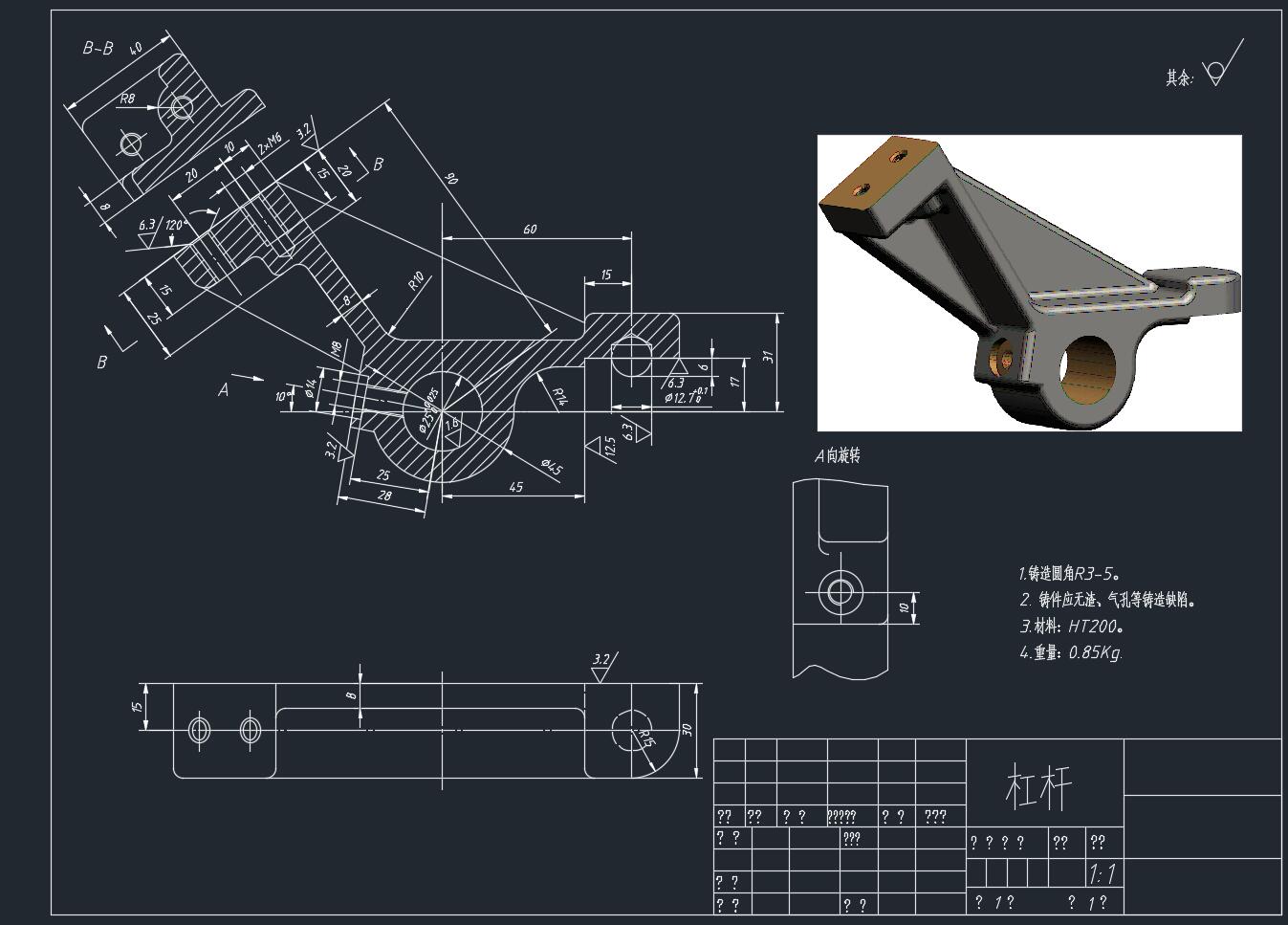
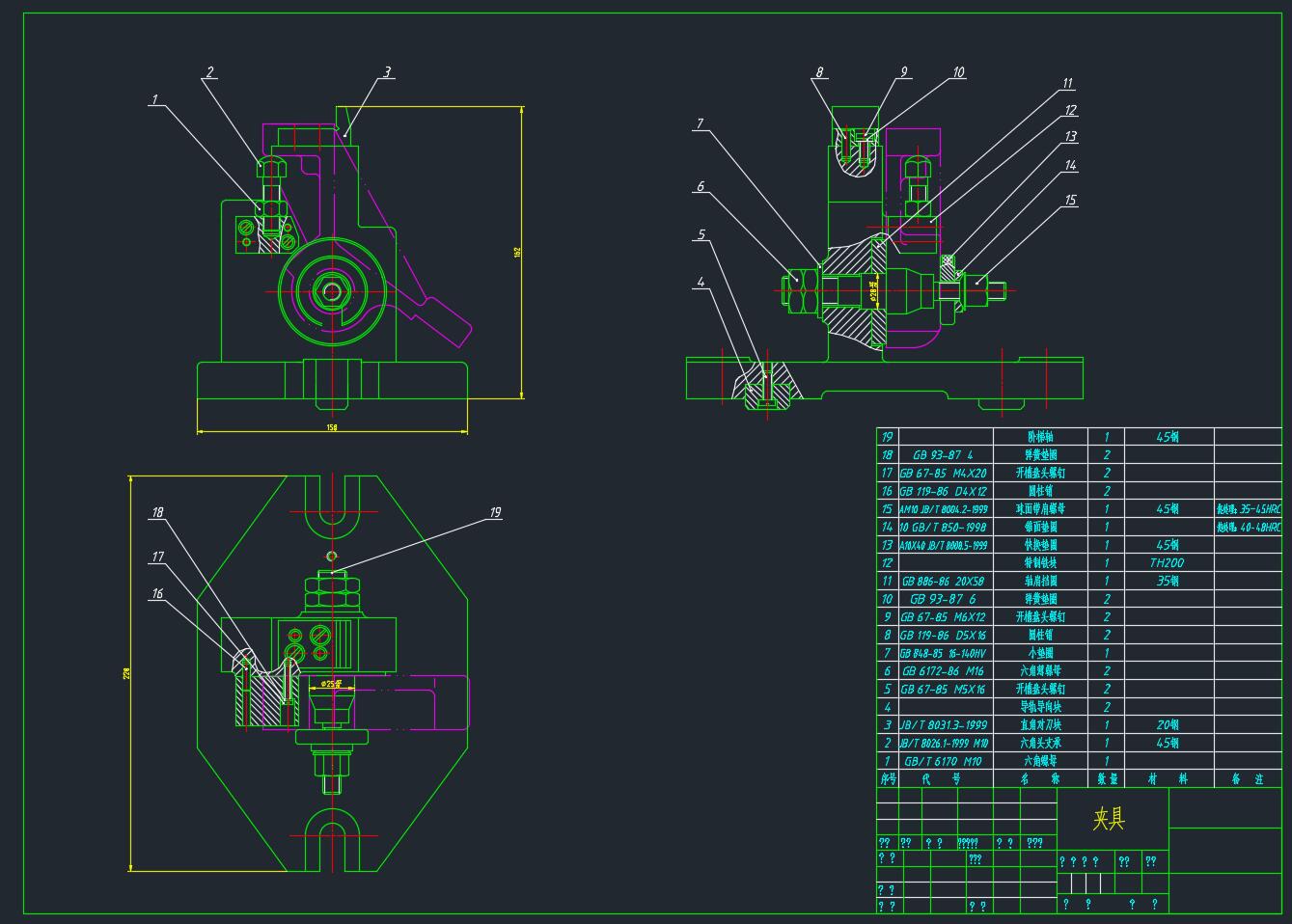
配套的CAD图纸需详细标注各部件尺寸、装配关系及材料规格,为后续加工与调试提供依据。图纸包含机械臂三维模型、传动系统剖面图及电气布线示意图,通过分层标注清晰呈现设计逻辑,便于使用者快速理解结构原理。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。


评论













