上肢康复机器人结构设计(全套)本科毕业设计——论文、CAD图纸、开题报告、任务书
内容
上肢康复机器人作为辅助肢体功能恢复的重要设备,其结构设计需兼顾机械可靠性、人机交互安全性与康复训练有效性。核心设计思路围绕患者上肢运动特征展开,通过模块化机械臂、可调节支撑结构与轻量化传动组件的协同,实现从肩关节到腕关节的复合运动辅助。机械臂采用多自由度串联结构,通过优化连杆长度比例与关节转动范围,确保覆盖日常活动所需的屈伸、旋转等动作轨迹。支撑系统设计注重重心平衡与压力分散,采用仿生学曲面与弹性缓冲材料,避免长时间训练引发的局部压迫,同时通过可调节夹具适配不同体型患者。
传动系统是确保运动平稳性的关键。采用同步带与齿轮齿条复合传动方式,既保证了动力传递的连续性,又通过冗余设计降低了单点故障风险。驱动单元集成力反馈传感器,可实时监测患者施力状态,为康复训练强度调整提供数据支持。结构材料选择兼顾强度与重量,主体框架采用航空铝合金,关节连接件使用高强度工程塑料,在保证整体刚性的同时显著降低设备自重,便于临床移动与操作。
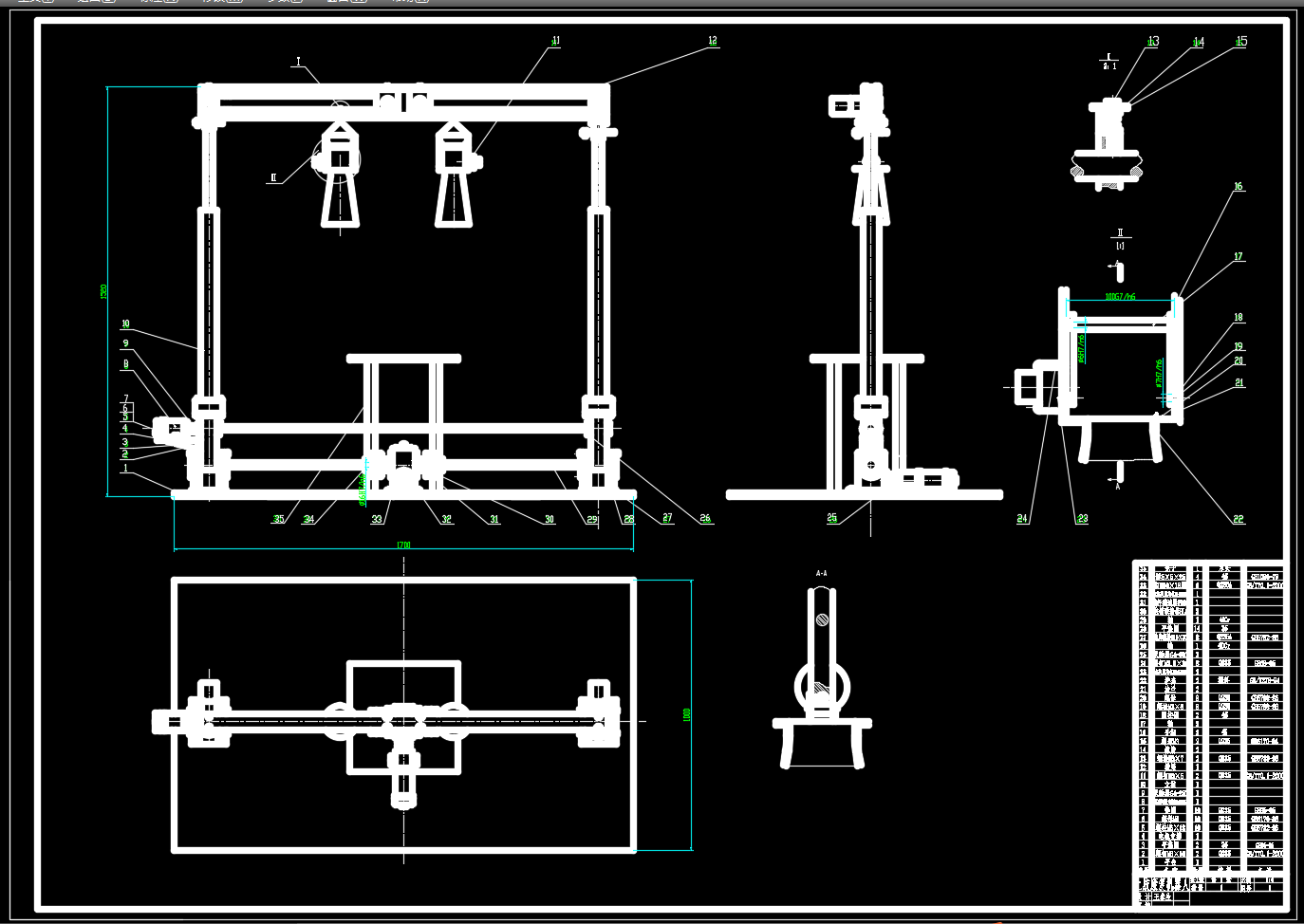
配套的CAD图纸需详细标注各部件装配关系与尺寸公差,重点突出机械臂旋转轴线、传动带张紧机构等关键部位的工艺要求。图纸中应包含爆炸视图与剖面图,直观展示内部结构布局与零件配合方式。任务书需明确设计目标与验证方法,例如通过有限元分析验证关键部件应力分布,或通过样机测试评估运动范围达标率。开题报告则需系统梳理上肢康复医学原理与现有设备技术瓶颈,论证结构创新点的必要性。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。




评论













