三自由度机械手设计
内容
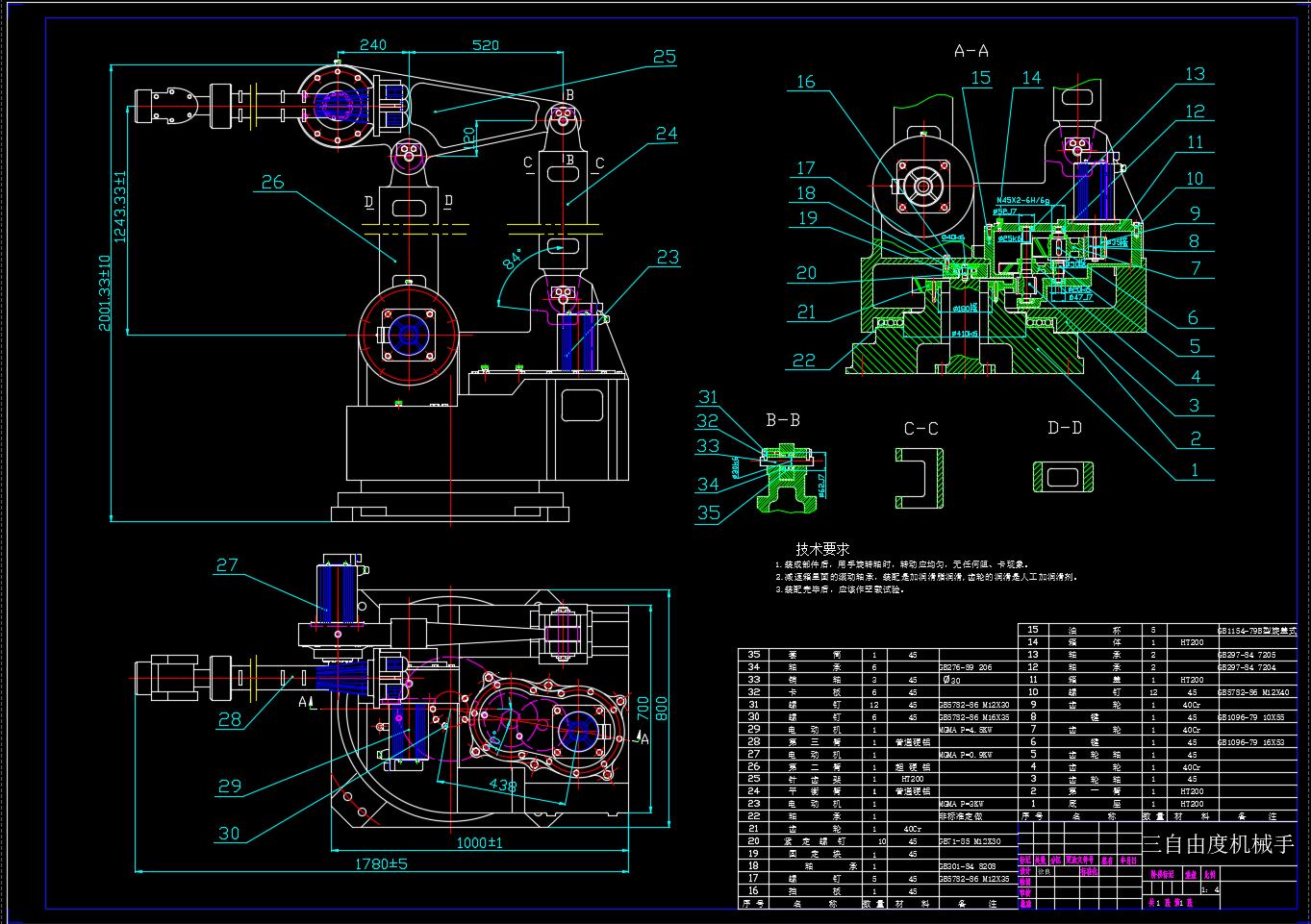
三自由度机械手是工业自动化领域中应用广泛的核心设备,其核心作用在于通过三个独立运动轴的协同控制,实现末端执行器在三维空间内的精准定位与灵活操作。这种设计既保留了多关节机械臂的灵活性,又通过简化结构显著降低了控制复杂度与成本,尤其适合装配、分拣、焊接等对精度与效率要求较高的场景。例如,在电子元件装配线上,机械手可通过旋转、俯仰与伸缩三个动作,快速完成芯片抓取、定位与贴装,显著提升生产节拍与产品良率。
从结构组成看,三自由度机械手通常包含基座、旋转关节、俯仰关节与伸缩机构四大模块。基座作为支撑主体,需具备高刚性与抗振性;旋转关节通过伺服电机驱动,实现水平面内的360度旋转;俯仰关节则通过连杆或齿轮传动,控制末端执行器的上下摆动;伸缩机构多采用滚珠丝杠或同步带传动,实现直线方向的精准移动。各模块间通过精密轴承与联轴器连接,确保运动传递的平稳性与低误差。
在控制层面,三自由度机械手依赖运动学算法实现轨迹规划与姿态调整。正向运动学通过已知关节角度计算末端位置,反向运动学则根据目标位置反推各关节需转动的角度。这一过程需结合传感器反馈实时修正误差,例如通过编码器监测关节角度,通过力传感器感知抓取力度,从而避免因惯性或外力导致的定位偏差。此外,模块化设计使得机械手可根据任务需求快速更换末端执行器,如夹爪、吸盘或焊枪,进一步拓展应用场景。
相较于六自由度机械臂,三自由度设计在显著缩短设计周期的同时,降低了对控制系统算力的要求,更适合中小型企业或预算有限的场景。其结构紧凑、维护便捷的特点,也使其成为实验室研究、教学演示等领域的理想选择。
本文系统梳理了相关主题的核心概念、理论框架与关键思路,帮助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。



评论













