滑道式提升机及其控制电路的设计(论文+CAD图纸+开题报告+任务书+外文翻译……)
内容
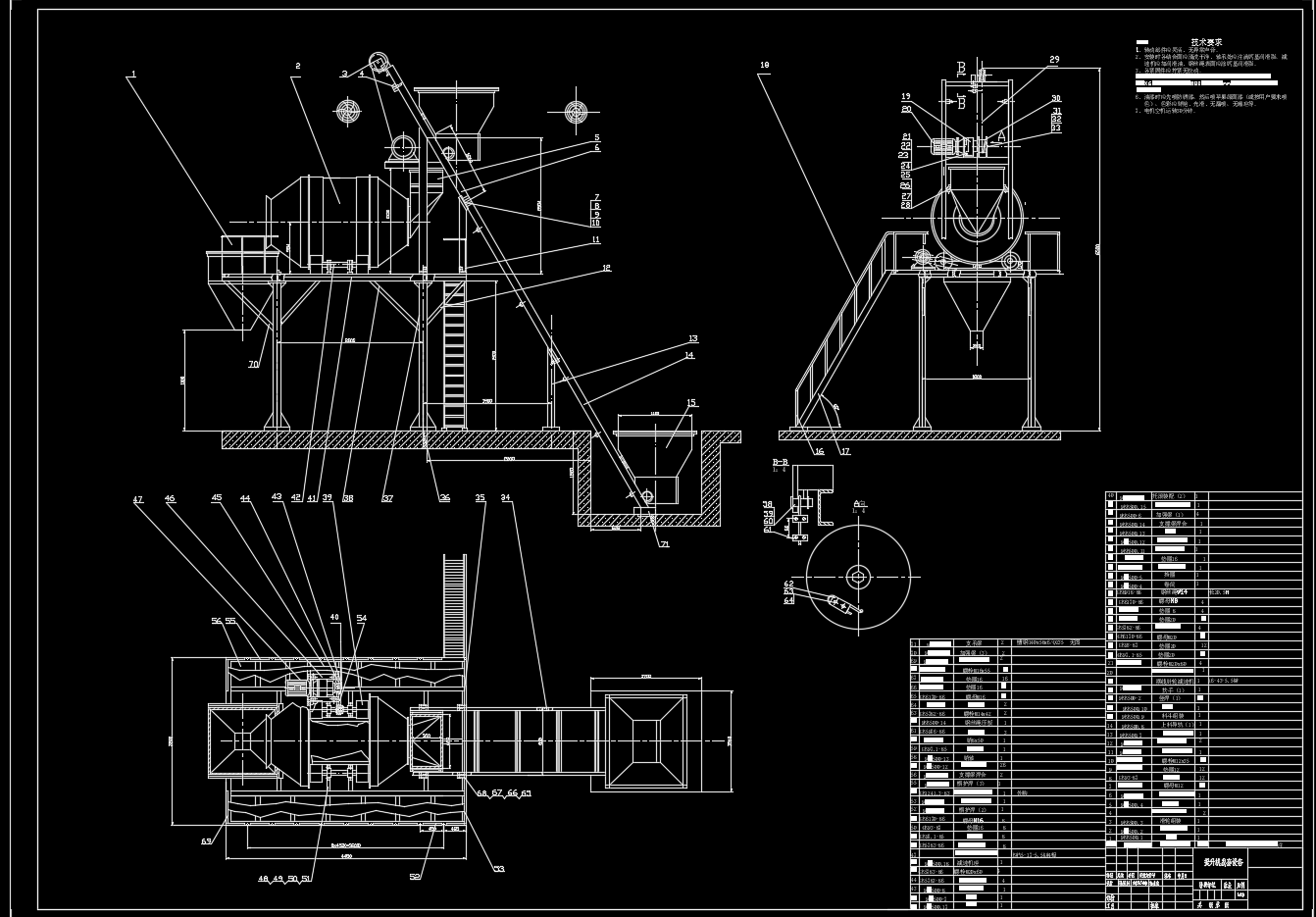
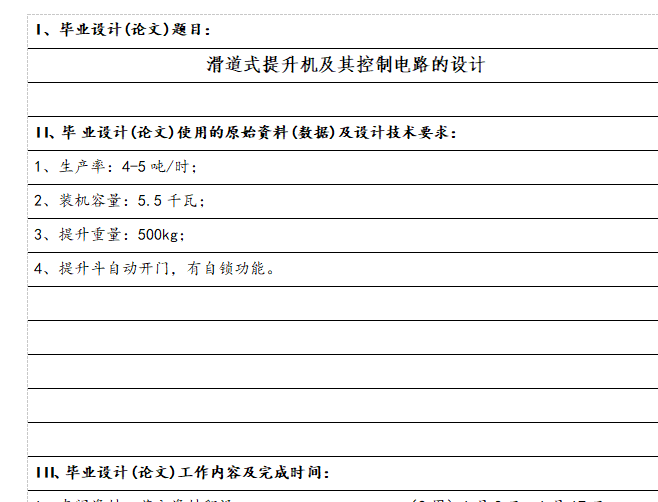
滑道式提升机作为物料垂直输送的核心设备,其设计需兼顾结构稳定性与运行效率。该设备通过滑道导向实现物料精准定位,配合驱动装置完成升降动作,广泛应用于仓储物流、工业装配等场景。其核心优势在于模块化设计理念——滑道采用高强度合金钢制造,表面经热处理工艺提升耐磨性;驱动系统集成变频调速功能,可根据负载动态调整运行速度,有效降低能耗。控制电路作为设备运行的“神经中枢”,采用PLC为核心控制器,通过传感器实时监测运行状态,实现过载保护、急停响应等安全功能,同时支持多段速控制以满足不同工况需求。
在控制电路设计层面,系统采用分层架构实现功能解耦。主控层负责逻辑运算与指令下发,通过Modbus协议与上位机通信;驱动层集成电机控制器与制动单元,确保启停平稳无冲击;监测层部署位移传感器与电流互感器,形成闭环反馈机制。这种设计显著提升了系统可靠性——当任一传感器故障时,备用通道可自动切换,避免设备停机。电路布局遵循电磁兼容原则,强电与弱电线路分槽敷设,关键信号线采用屏蔽双绞线,有效抑制干扰。通过仿真分析优化布线方案后,设备在复杂电磁环境下的误动作率降低。
该设计方案的实施显著缩短了设备调试周期。传统提升机需现场反复调整机械限位与电气参数,而滑道式结构通过预装定位销实现快速对中,配合控制电路的自校准功能,整机安装时间大幅压缩。维护便捷性同样得到提升:滑道采用分段式设计,局部磨损可单独更换;控制电路预留扩展接口,支持后续加装物联网模块实现远程监控。经实际测试,设备在连续运行工况下的故障间隔时间延长,维护成本降低,为高强度作业场景提供了可靠解决方案。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。


评论













