机械手夹持器毕业设计论文(含装配图)
内容
机械手夹持器作为自动化装备中的核心执行部件,其设计质量直接影响机械手对目标物体的抓取稳定性与操作精度。该装置通过机械结构与动力系统的协同作用,实现对不同形状、尺寸及材质物体的可靠夹持,是连接机械手本体与作业对象的关键环节。其核心功能涵盖三方面:一是通过自适应夹持机构适应物体外形变化,避免因接触面不足导致的滑脱;二是通过力反馈控制确保夹持力在安全范围内,防止对精密元件或易碎品造成损伤;三是通过模块化设计实现快速更换,满足多工况作业需求。这些特性使其在工业分拣、装配线及科研实验等领域具有不可替代的作用。
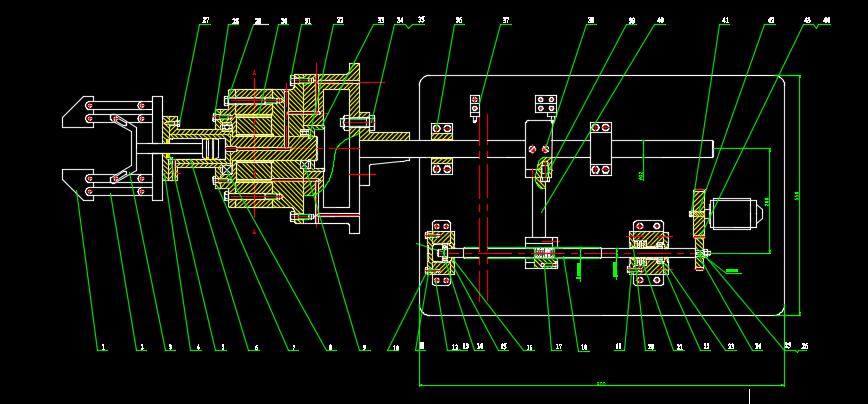
从结构组成看,机械手夹持器通常由驱动单元、传动机构、夹爪组件及传感器系统构成。驱动单元多采用气动或电动方式,前者响应速度快但精度较低,后者控制精度高但需配套驱动器;传动机构通过连杆、齿轮或凸轮等结构将动力转化为夹爪的开合运动,其设计需兼顾运动平顺性与传动效率;夹爪组件直接接触物体,其表面材质需根据作业对象特性选择,例如橡胶涂层用于防滑,硬质合金用于高温环境;传感器系统则通过压力、位移或视觉信号实时反馈夹持状态,为控制系统提供决策依据。各子系统的匹配程度直接影响整体性能,例如驱动单元的输出扭矩需与传动机构的减速比协调,以避免动力浪费或过载。
在装配图设计阶段,需重点关注零件间的配合关系与运动轨迹。例如,夹爪与传动轴的连接需采用键槽或花键结构确保扭矩传递,同时预留间隙补偿热膨胀;驱动单元与基座的固定需通过定位销实现精确对中,防止运动偏移;传感器安装位置需避开干涉区域,并确保信号线束布局合理。通过三维建模与虚拟装配验证各零件的运动兼容性,可显著缩短调试周期。此外,材料选择需平衡强度与重量,例如铝合金基座可减轻整体质量,而不锈钢夹爪能提升耐磨性。
本文系统梳理机械手夹持器的核心概念、理论框架与关键设计思路,助读者快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。



评论













