机械手-集装箱波纹板焊接机器人机构运动学分析及车体结构(论文 CAD图纸 开题报告 任务书 答辩PPT 外文翻译……)
内容
机械手-集装箱波纹板焊接机器人机构运动学分析是理解其运动规律与功能实现的核心环节。该分析聚焦于机械手各关节的自由度分配、运动链构建及坐标系转换,通过建立数学模型描述末端执行器在三维空间中的位置与姿态变化。例如,针对波纹板焊接的特殊需求,需精确计算焊枪与工件表面的相对运动轨迹,确保焊接路径覆盖波纹板的起伏结构,同时避免干涉。运动学分析不仅为机器人结构优化提供理论依据,还能通过逆运动学求解确定各关节的驱动参数,从而提升焊接精度与效率。这一过程需结合刚体运动学与齐次变换矩阵等理论工具,确保分析结果的严谨性与可重复性。
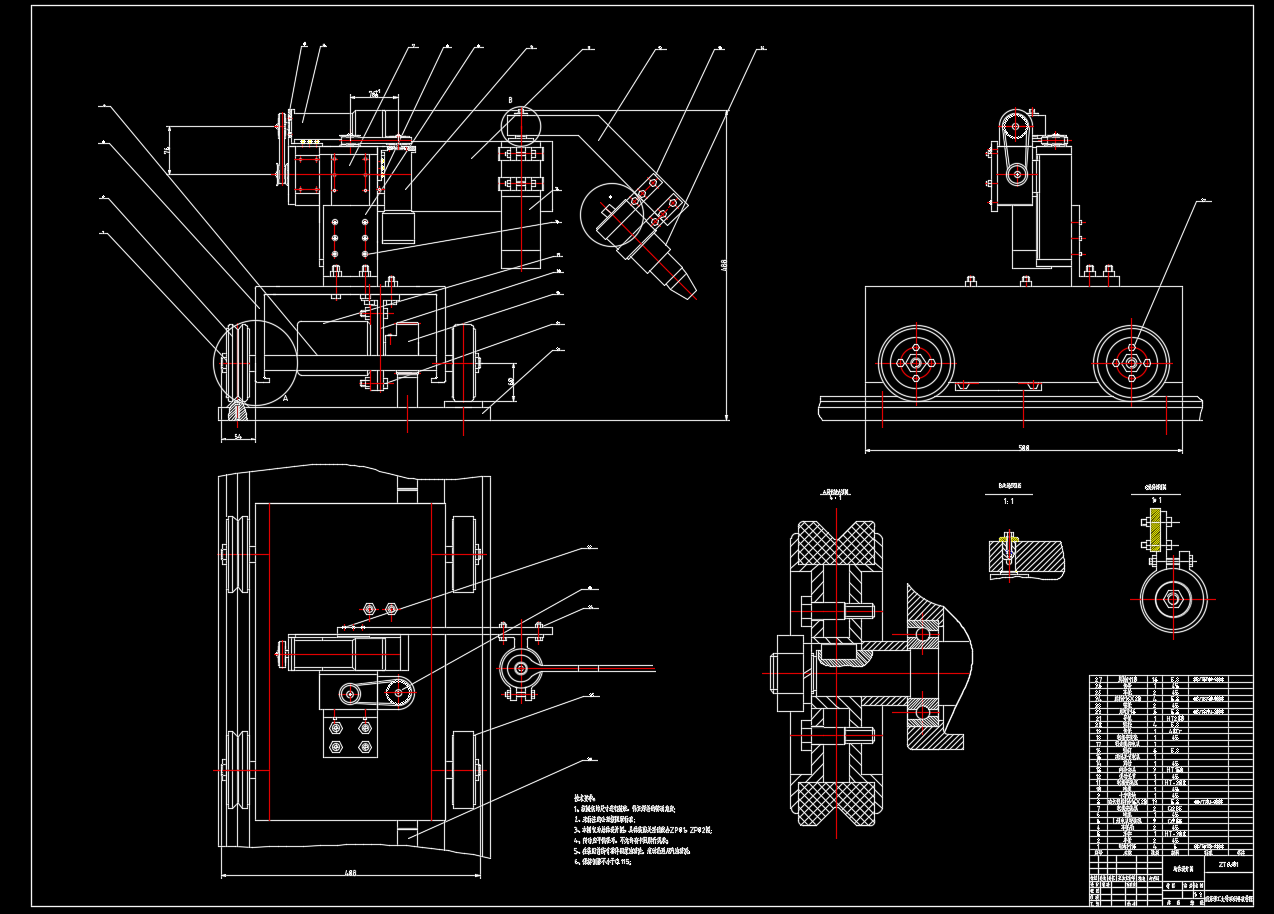
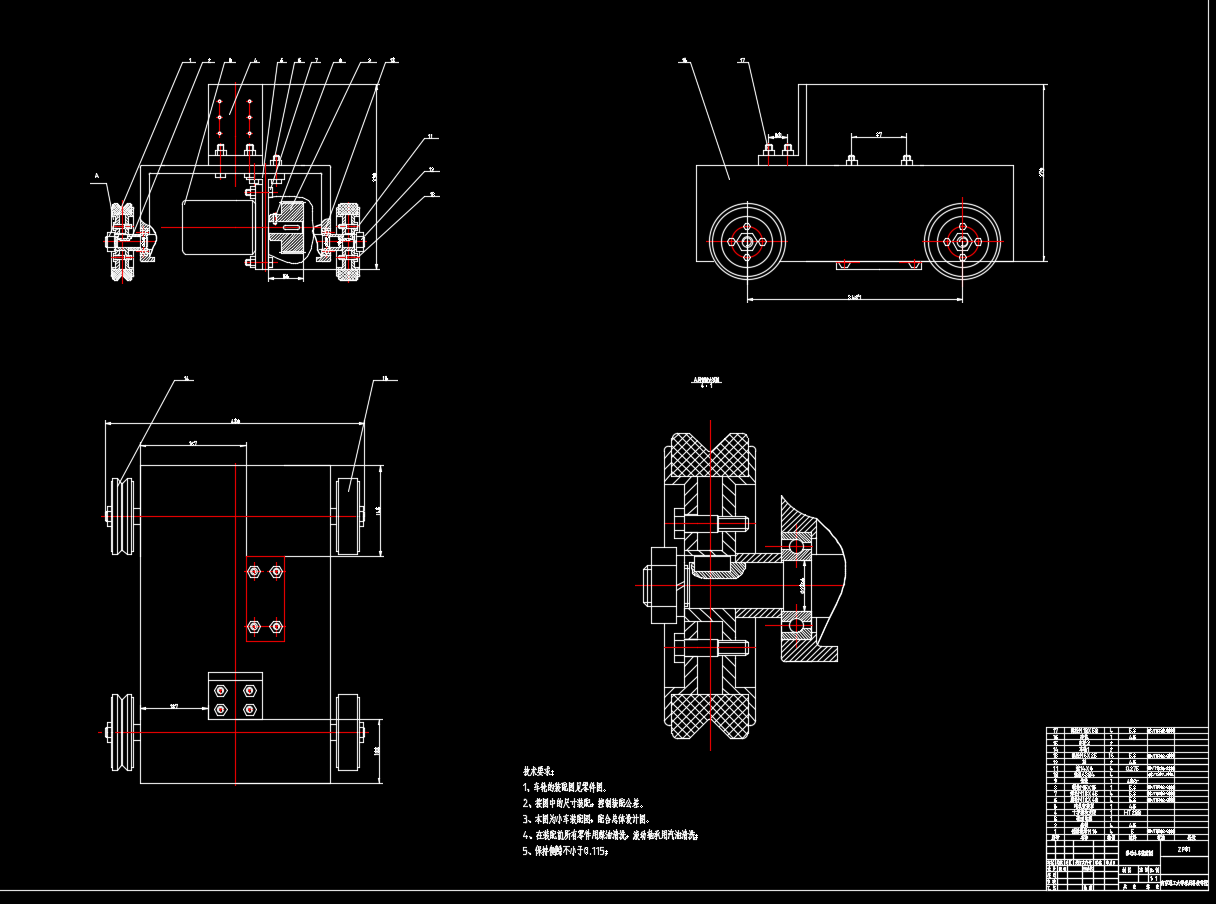
车体结构设计是支撑机器人稳定运行与高效作业的基础。其核心在于平衡刚度、强度与轻量化需求,以适应集装箱焊接现场的复杂工况。车体通常采用框架式结构,通过有限元分析优化关键部件的截面形状与连接方式,减少焊接过程中产生的振动与变形。例如,针对波纹板焊接时的高频冲击载荷,需在车体底部增设加强筋或采用高强度合金材料,提升整体抗疲劳性能。此外,车体的模块化设计可便于快速更换功能组件,如机械手安装座或焊接电源模块,显著缩短调试周期。结构设计还需考虑人机协作需求,例如预留维护通道或集成传感器安装接口,为后续功能扩展提供便利。
学习资料中包含的CAD图纸与开题报告等文件,为机械手-集装箱波纹板焊接机器人的研发提供了系统化支持。CAD图纸通过三维建模与二维工程图结合的方式,直观展示车体结构、机械手布局及关键零部件的装配关系,辅助设计者验证空间干涉与运动可行性。开题报告则从研究背景、目标与方法论层面梳理项目逻辑,明确技术路线与预期成果,为后续实验验证与优化提供方向指引。任务书与答辩PPT进一步细化研究节点与成果呈现形式,确保研发过程符合学术规范与工程标准。外文翻译文件则通过引入国际前沿技术文献,拓宽设计思路,例如借鉴国外类似机器人在波纹板焊接中的路径规划算法或材料选择经验。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













