机械手-运送铝活塞铸造毛坯机械手设计
内容
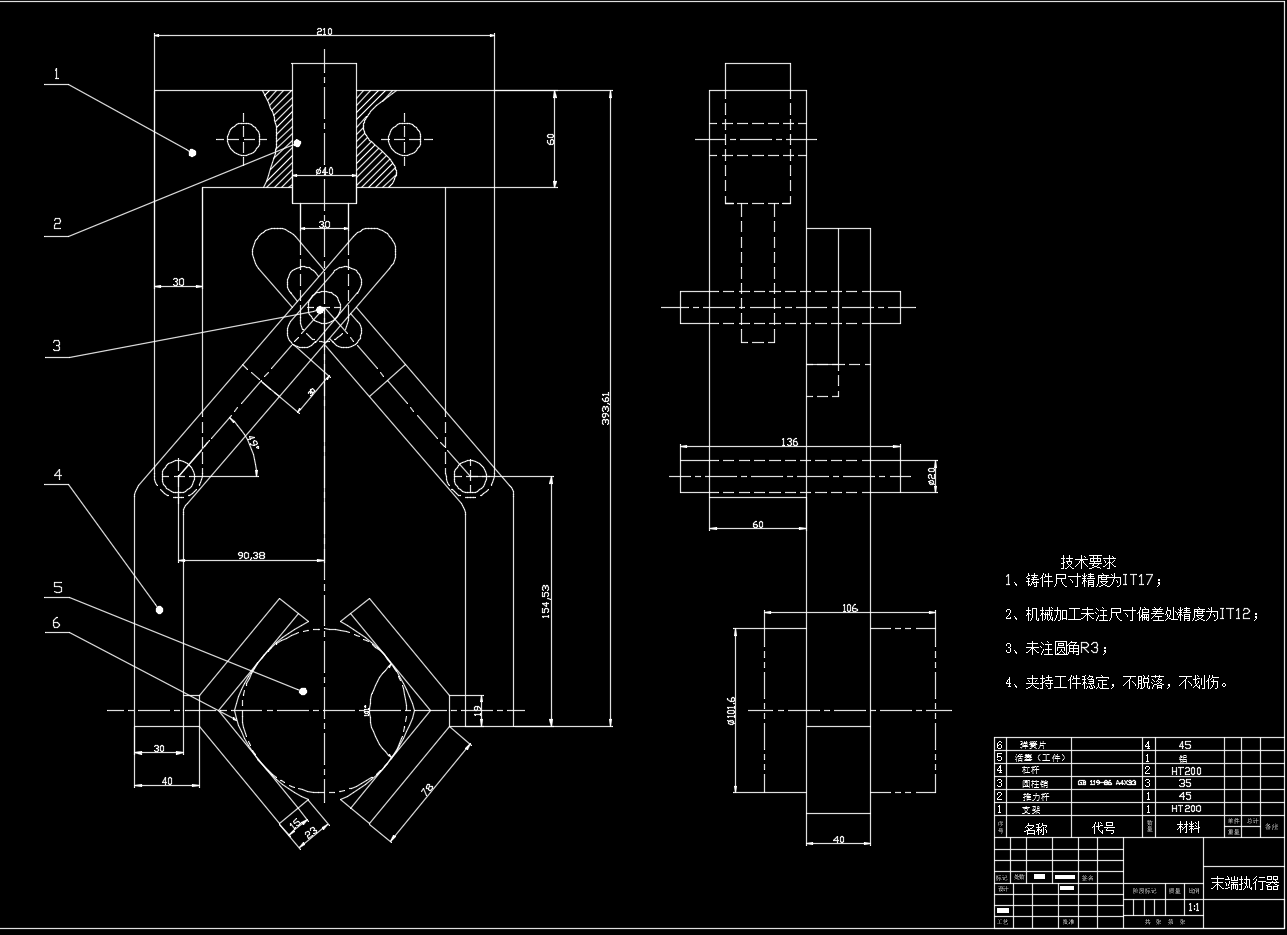
在铝活塞铸造工艺中,毛坯的运送环节直接影响生产效率与成品质量。传统人工搬运方式存在劳动强度大、定位精度低、安全隐患多等问题,尤其在高温、高粉尘的铸造车间环境中,长期作业易导致操作人员疲劳,进而引发搬运失误或安全事故。运送铝活塞铸造毛坯的机械手通过自动化设计,替代人工完成毛坯的抓取、转移与放置任务,实现搬运过程的标准化与可控化。其核心作用在于提升搬运效率的同时,减少人为因素对毛坯质量的干扰,例如避免因碰撞导致的表面划痕或变形,为后续加工工序提供稳定的基础。
机械手的设计需紧密结合铝活塞毛坯的物理特性与铸造车间的作业环境。毛坯通常具有表面粗糙、温度较高、形状不规则等特点,要求机械手具备高刚性的抓取机构与耐高温的末端执行器。通过优化机械结构与传动系统,机械手可实现快速定位与平稳搬运,显著缩短搬运周期。此外,针对铸造车间空间紧凑、设备布局密集的特点,机械手采用紧凑型设计,减少占地面积,同时通过模块化设计实现功能扩展,例如可集成视觉识别系统以适应不同规格毛坯的抓取需求。
在安全性与可靠性方面,机械手通过多重防护机制保障作业安全。例如,设置力反馈传感器实时监测抓取力,避免因过度挤压损坏毛坯;采用防碰撞设计,在遇到障碍物时自动停止或调整路径;配备紧急停止按钮与安全光幕,防止操作人员误入作业区域。这些设计不仅降低了事故风险,也延长了设备使用寿命,减少了维护成本。通过标准化接口与兼容性设计,机械手可与铸造生产线上的其他设备无缝对接,形成高效的自动化作业单元。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













