机械手-液压机械手(说明书+CAD图纸+SolidWorks三维图+开题报告+任务书+文献)
内容
液压机械手作为自动化领域的关键执行装置,其核心作用在于通过液压系统驱动多自由度机械结构,实现精准的物料抓取、搬运与定位操作。相较于传统机械传动方式,液压驱动具备输出力大、响应速度快、过载保护能力强等优势,尤其适用于重载、高频次作业场景。其设计融合了机械设计、液压传动与控制理论,通过合理规划液压回路与机械臂结构,确保系统在复杂工况下仍能保持稳定运行。该装置的研发不仅提升了工业生产的自动化水平,还为危险环境作业(如高温、高压、有毒场所)提供了安全可靠的解决方案,有效降低了人工操作风险。
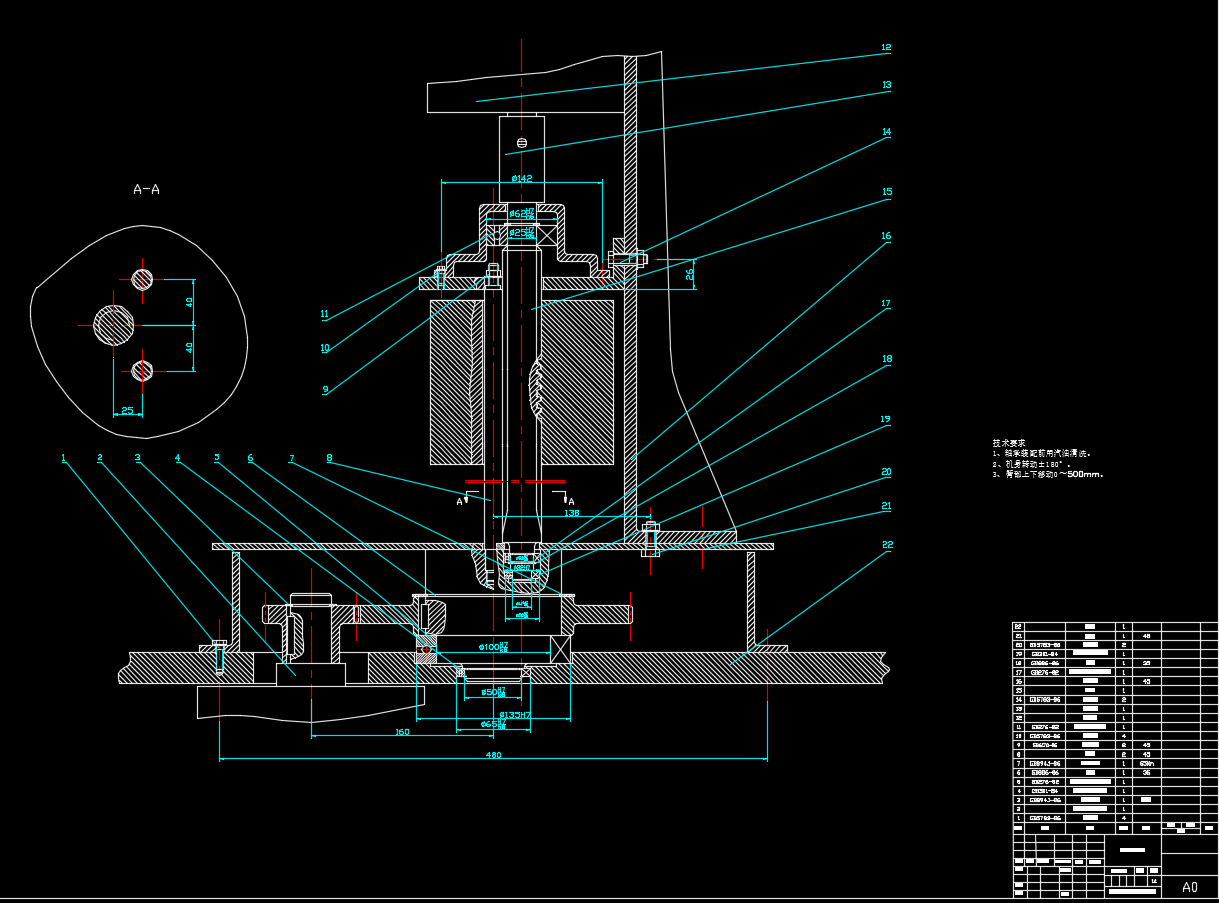
学习资料中包含的CAD图纸与SolidWorks三维模型,详细展示了液压机械手的机械结构与装配关系。CAD图纸以二维工程图形式呈现各零部件的尺寸、公差及配合要求,为零件加工与装配提供精确指导;三维模型则通过可视化方式展示机械臂的运动范围、干涉区域及整体布局,辅助设计者优化结构参数。开题报告与任务书明确了研发目标、技术路线及实施计划,从需求分析到方案论证,再到关键技术攻关,形成了一套系统化的研发框架。文献部分则梳理了液压传动、机械臂动力学及控制策略等领域的前沿研究成果,为设计提供理论支撑。
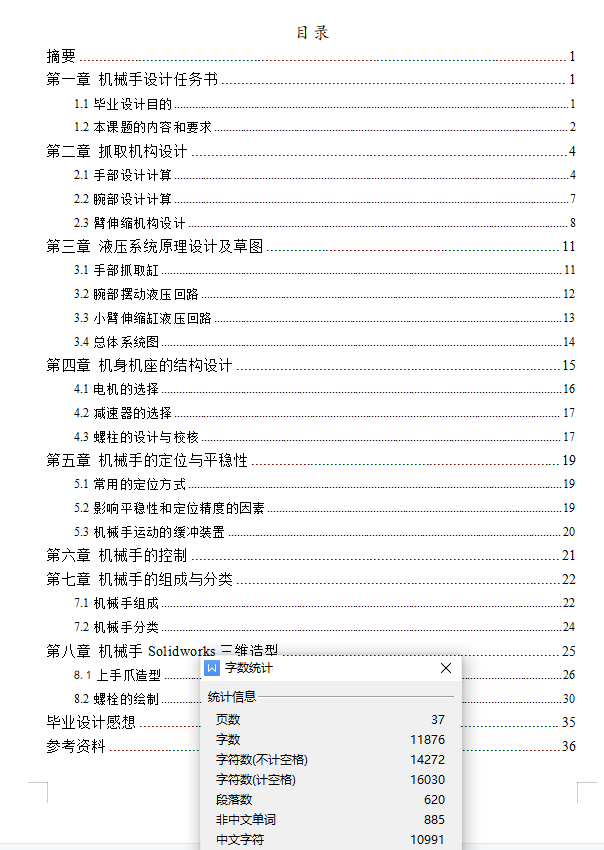
从设计流程来看,液压机械手的开发需经历概念设计、详细设计、仿真验证与优化改进等阶段。概念设计阶段需结合应用场景确定自由度配置、负载能力及运动范围;详细设计阶段则需完成液压回路设计、机械结构强度校核及零部件选型;仿真验证阶段通过多体动力学分析评估系统动态性能,确保运动平稳性与定位精度。学习资料中的实用资料覆盖了各阶段的关键技术点,通过案例分析与理论推导相结合的方式,帮助使用者快速掌握设计方法。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













