机械手-SC750三轴伺服驱动机器人机构设计
内容
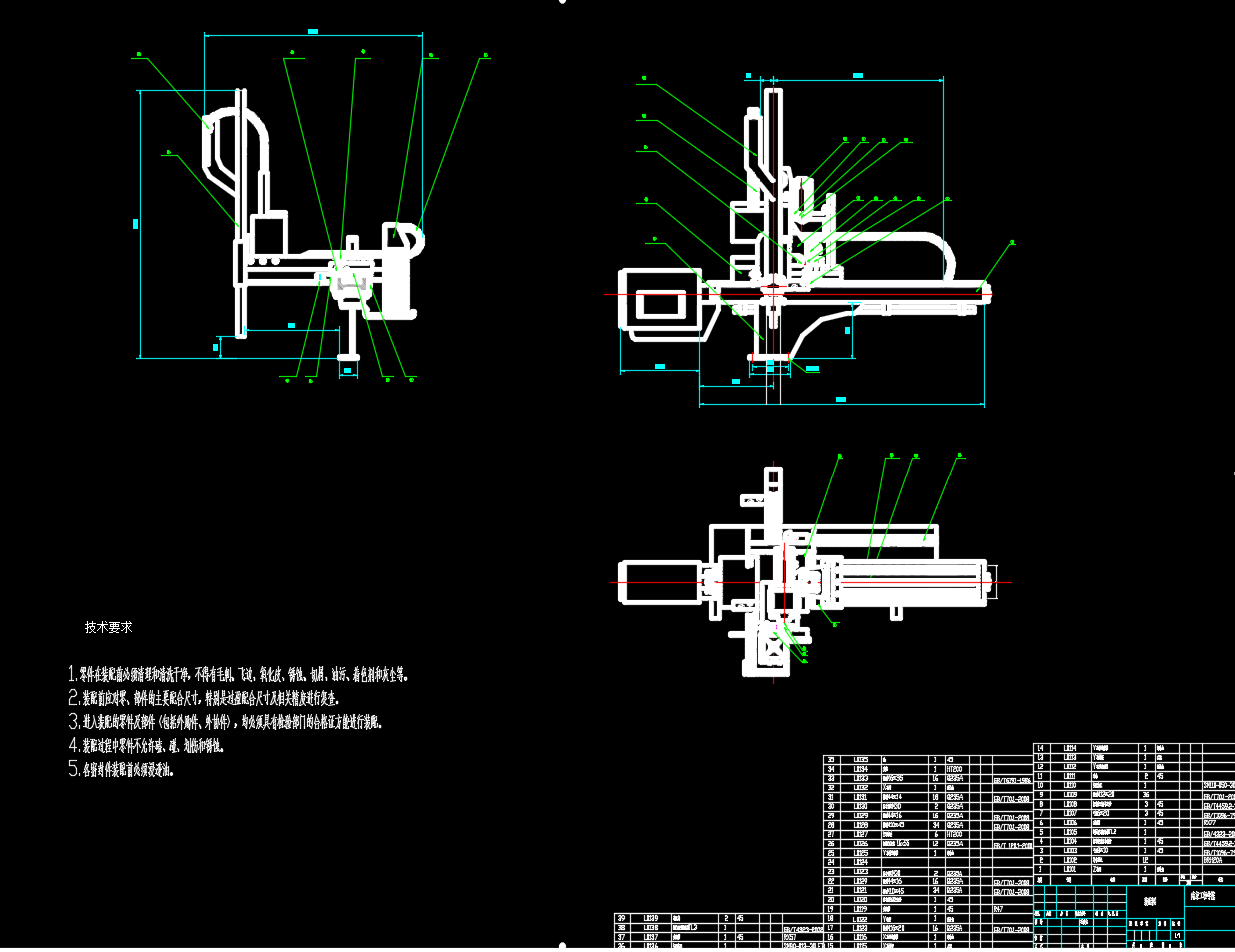
SC750三轴伺服驱动机器人作为工业自动化领域的典型机械手,其核心作用在于通过高精度伺服电机与传动机构的协同,实现三维空间内的精准定位与灵活操作。三轴结构(X、Y、Z方向)覆盖了水平移动、垂直升降及深度进给等基础动作,能够满足物料搬运、装配、检测等场景的轨迹规划需求。伺服驱动系统通过闭环控制实时修正位置偏差,确保机械手末端执行器在高速运动中仍保持毫米级定位精度,尤其适用于对重复定位要求严苛的精密加工场景。其模块化设计理念使得各轴驱动单元可独立调试,显著缩短了系统集成与参数优化的时间。
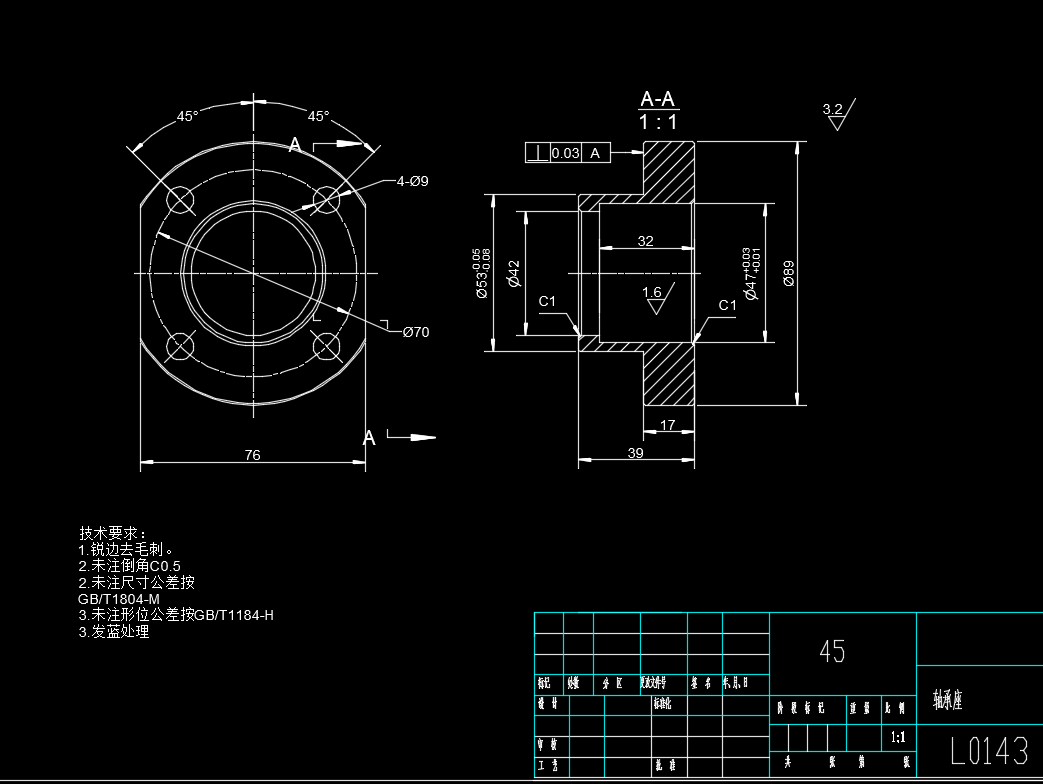
该机械手的传动系统采用高刚性滚珠丝杠与直线导轨组合,既保证了运动平稳性,又通过预紧设计消除了反向间隙,进一步提升了轨迹跟踪精度。伺服电机与减速器的匹配经过动力学仿真优化,在输出足够扭矩的同时降低了惯量比,使机械手在启停阶段的加速度响应更迅速,有效缩短了非生产性动作时间。此外,三轴联动控制算法通过插补运算实现空间圆弧、直线等复杂轨迹的平滑过渡,避免了传统点位控制中的速度突变,显著提升了加工表面质量与设备使用寿命。
在应用适应性方面,SC750三轴机械手通过可更换的末端执行器接口设计,能够快速适配气动抓手、电动夹具或专用工具,满足不同工艺流程的切换需求。其开放式控制系统支持多协议通信接口,可与PLC、视觉系统等外围设备无缝对接,构建柔性制造单元。针对轻量化负载场景,结构优化后的机械臂在保证刚度的前提下降低了自身重量,减少了伺服电机的负载惯量,从而提升了整体动态响应性能,为高速分拣、精密装配等任务提供了可靠保障。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













