换刀机械手(论文+CAD图纸+proe三维图+答辩PPT)
内容
换刀机械手作为数控机床的核心辅助装置,其核心作用在于实现刀具的自动化更换与精准定位,显著提升加工效率与操作安全性。传统手动换刀模式依赖人工操作,存在耗时长、定位精度低、劳动强度大等弊端,而换刀机械手通过机械结构与控制系统的协同设计,可快速完成刀具的抓取、搬运与安装动作。其设计需兼顾运动轨迹的精确性、机械结构的稳定性及与机床主轴的适配性,确保在高速换刀过程中刀具与主轴的同轴度误差控制在允许范围内,从而保障加工质量。
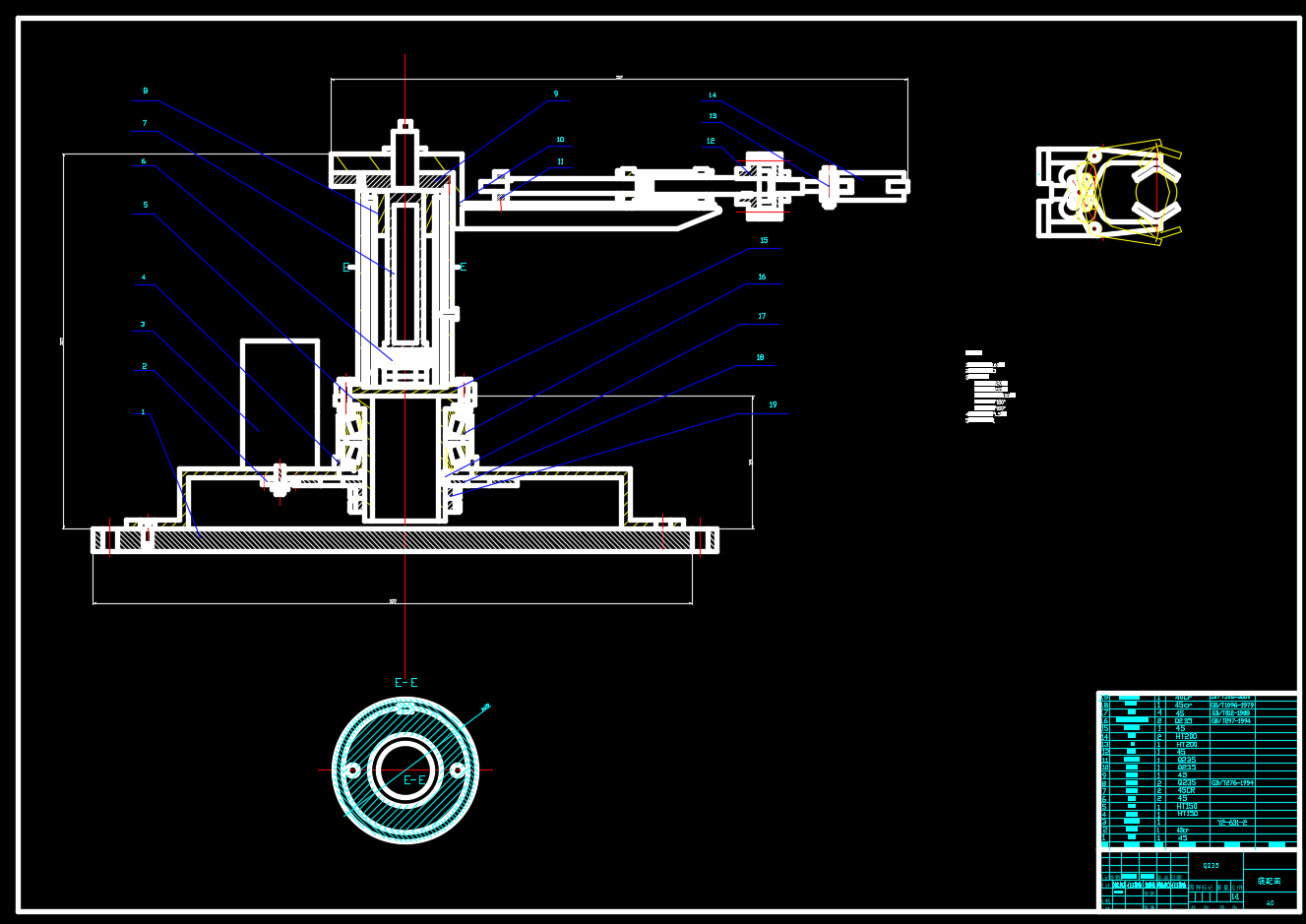
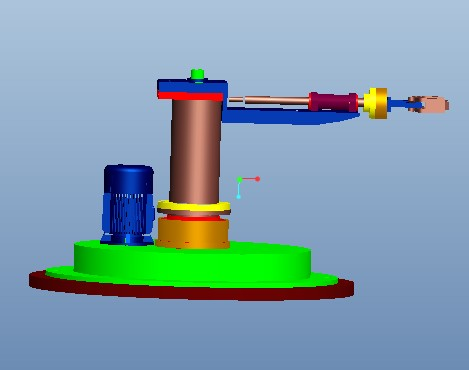
在结构设计层面,换刀机械手通常由驱动模块、传动模块、执行模块及定位模块构成。驱动模块多采用伺服电机或气动元件,为机械手提供动力支持;传动模块通过齿轮、连杆或同步带等机构将动力传递至执行端;执行模块包含夹持器与换刀臂,负责刀具的抓取与释放;定位模块则通过限位开关、光电传感器或编码器实现位置反馈,确保机械手在预设轨迹内运行。各模块的协同设计需综合考虑负载能力、运动速度及环境适应性,例如在重载场景下需优化传动比以降低电机负荷,在精密加工场景中需采用高精度传感器以提升定位重复性。
从应用价值来看,换刀机械手不仅缩短了机床的非切削时间,还通过减少人工干预降低了操作风险,尤其适用于多品种、小批量的柔性制造场景。其设计需严格遵循机械设计规范,例如通过有限元分析优化机械臂的刚度,通过运动学仿真验证轨迹规划的合理性,通过可靠性测试评估关键部件的寿命。此外,机械手与机床控制系统的集成设计需确保信号传输的实时性,避免因通信延迟导致换刀失败或碰撞事故。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。


评论













