您好!欢迎来到
设计帮帮网
!
注册
登录
账号登录
QQ登录
支付宝登录
微信登录
短信登录
ID:
余额:
0.00
元
积分:
0
积分
充值
签到
已签到
提现
安全
认证
收藏
退出登录
网站首页
手机版
网站公告
帮助中心
工单管理
管理中心
财务管理
在线充值
快速提现
提现历史
财务明细
积分明细
我是买家
购物车
发布需求
需求管理
买入订单
建立自助交易
我是卖家
发布出售
商品管理
售出订单
建立自助交易
店铺管理
商家保证金
帮助咨询
帮助中心
投诉建议
联系客服
关于我们
用户管理
基本资料
认证中心
我的收藏
用户等级
账户安全
修改密码
登录记录
安全退出
https://web.sjbb168.com/
商品
商品
店铺
资讯
热门搜索:
自定义的
免费发布需求
免费发布任务
建立自助交易
免费发布商品
11
全部商品分类
2D/3D/图纸
分组:
机械设备
交通运输
换热器
泵
生产线/流水线
减速机/减速器
车库
电动机/发电机/柴油机
布局图/布置图
机器人/机械手
罐/发酵罐/反应罐/搅拌罐/储罐/油罐
反应釜/反应器/精馏塔/换热器/冷却器/冷凝器
其它
机械设计资料
分组:
毕业设计/课程设计
图纸
文档
其它
模具设计资料
分组:
模具毕业设计/课程设计
说明书/论文
图档
其它
车辆设计资料
分组:
毕业设计/课程设计
图纸
文档
其它
采矿工程资料
分组:
毕业设计/课程设计
图纸/文档
其它
食品/化工/制药
分组:
毕业设计/课程设计
说明书/论文/图纸
其它
土木/建筑/资料
分组:
毕业设计/课程设计
图纸/文档/资料
其它
电气/PLC/单片机
分组:
毕业设计/课程设计
说明书/论文
图纸/CAD
其它
给排水/污水处理
分组:
毕业设计/课程设计
图纸/文档
水利/暖通/供换热
分组:
毕业设计/课程设计
CAD图纸
文档资料
其它
技术资料/其它
分组:
工具/软件/动画
参考资料
文档资料
勘察报告
其它
首页
机械
车辆
模具
土木
PLC
减速器
机器人
机械手
空调系统
采矿
化工
手机版
当前位置:
首页
>
资讯
>
2D/3D/图纸
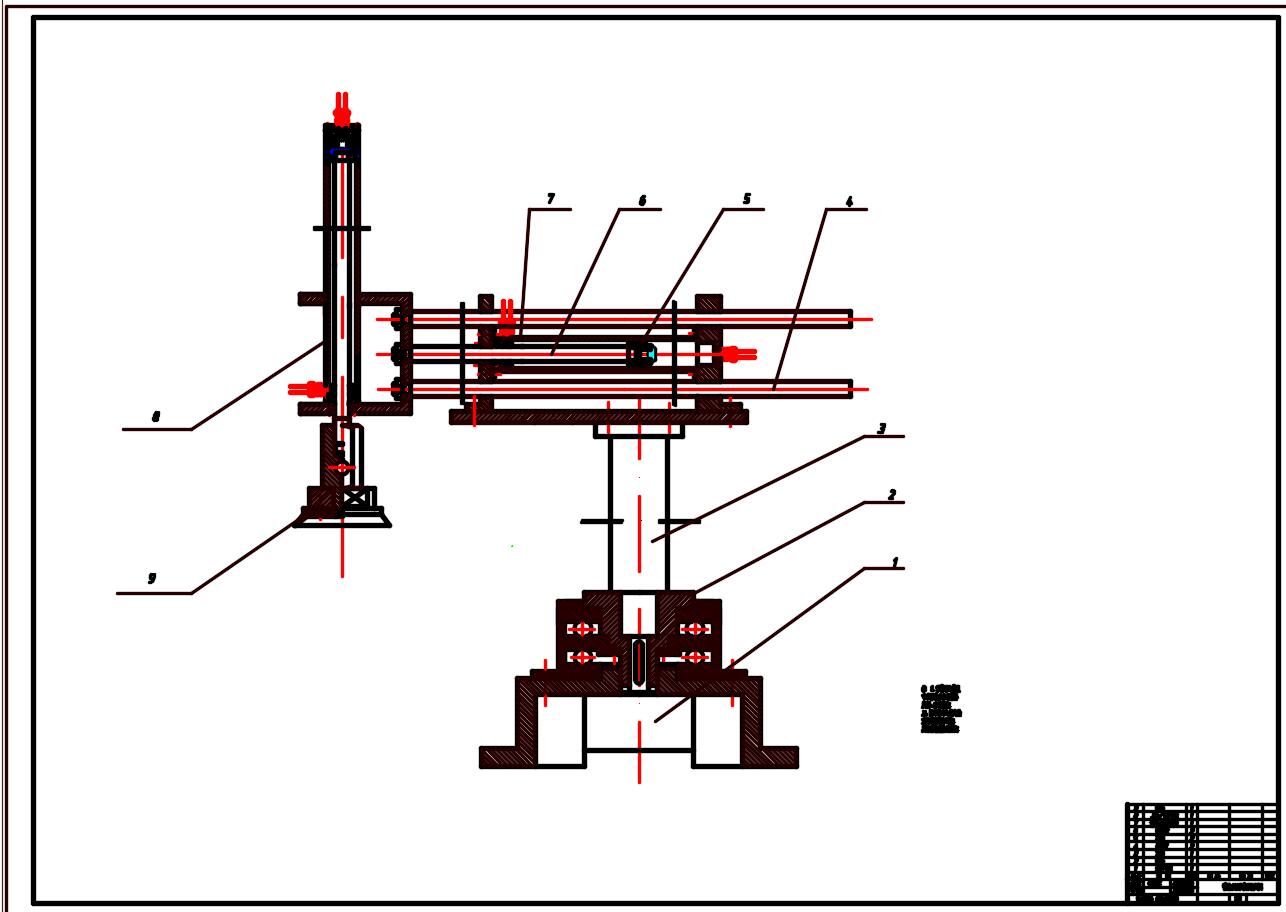
基于PLC的物料分拣机械手自动化控制系统设计毕业设计全套
分类:
2D/3D/图纸
时间:2026-03-28 19:15
浏览:44
内容
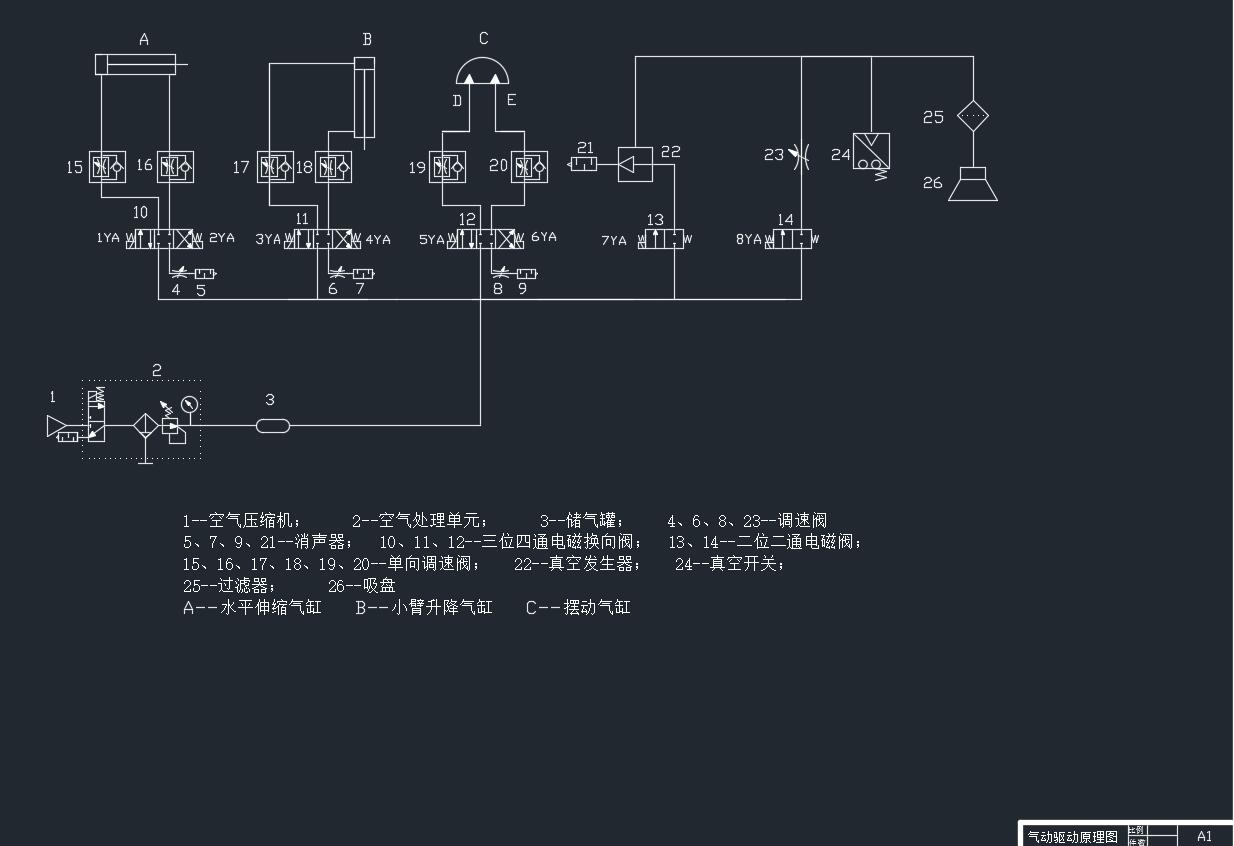
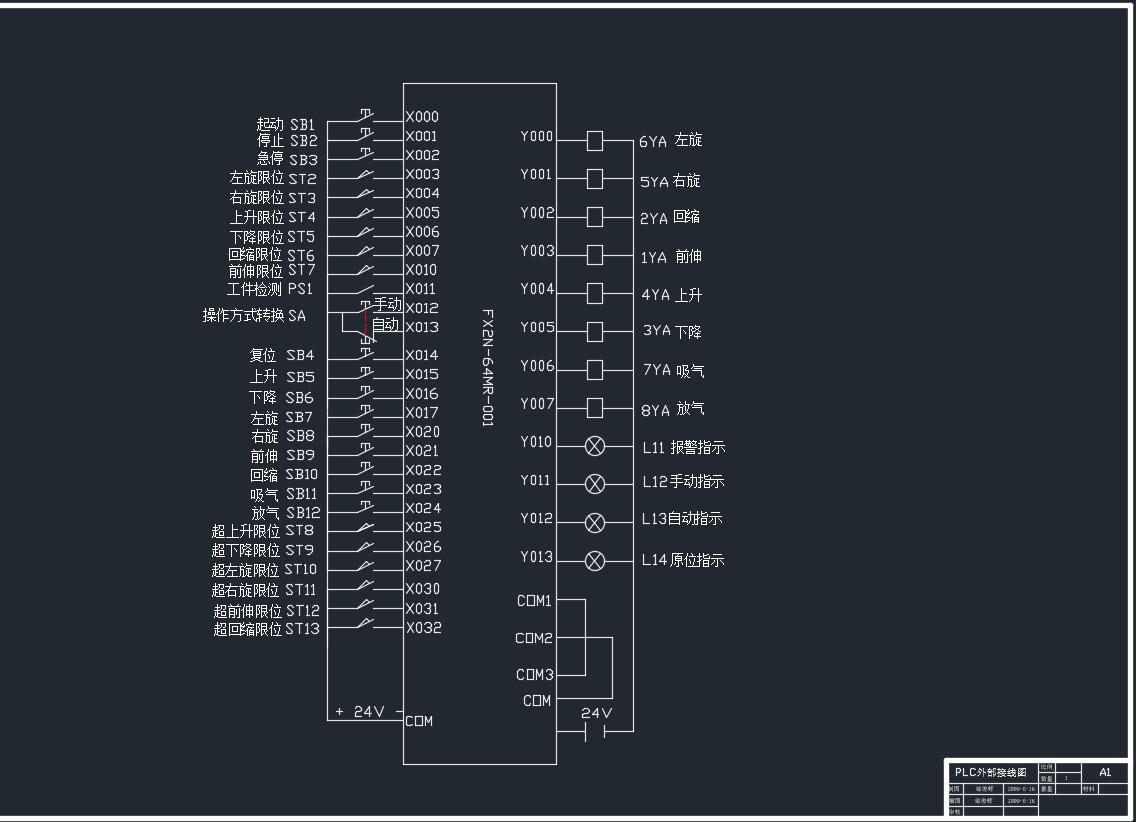
基于PLC的物料分拣机械手自动化控制系统是现代工业自动化领域的重要应用,其核心作用在于通过可编程逻辑控制器(PLC)实现机械手对物料的精准识别、分类与搬运。该系统以PLC为控制中枢,结合传感器阵列、驱动模块及机械结构,构建起闭环控制体系。传感器负责采集物料的位置、颜色、形状等特征信息,PLC根据预设逻辑对信号进行处理,输出控制指令驱动机械手完成抓取、分拣及放置动作。相较于传统人工分拣,该系统显著提升了分拣效率与准确性,同时降低了人力成本与操作风险,为物流、制造等行业提供了可靠的自动化解决方案。
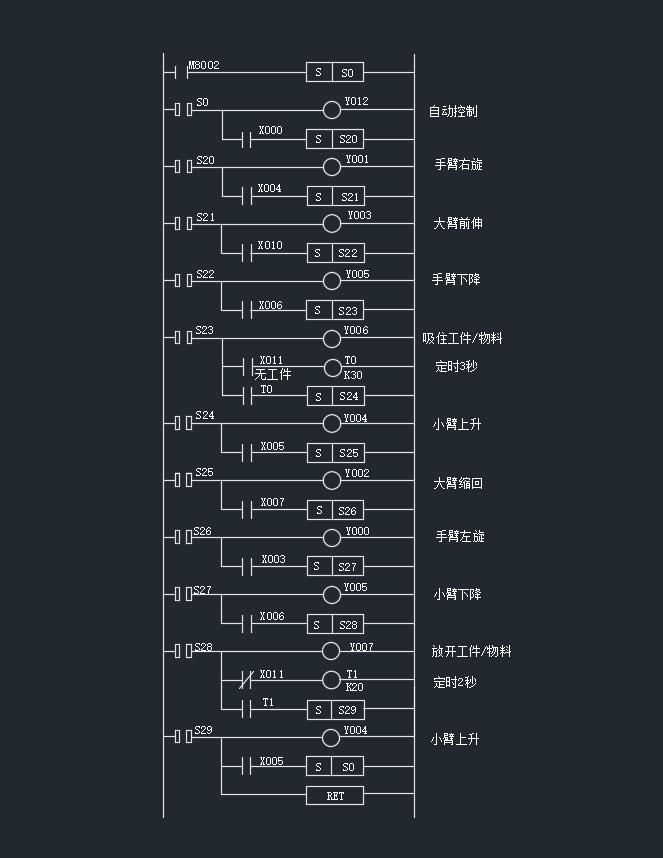
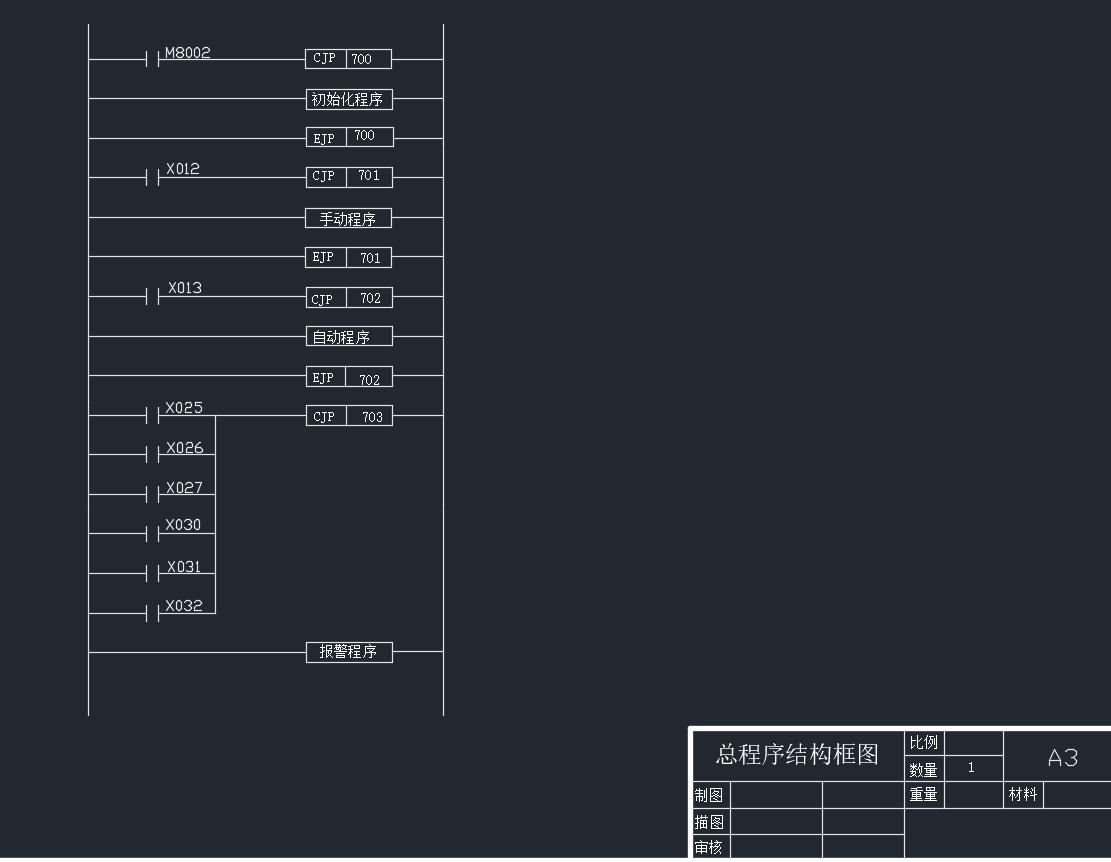
系统设计需兼顾硬件选型与软件编程的协同优化。硬件层面,需根据分拣需求选择合适的传感器类型(如光电传感器、颜色传感器)及机械手结构(如关节式、直角坐标式),确保系统具备足够的灵活性与负载能力;PLC的选型则需考虑输入输出点数、运算速度及扩展性,以支持复杂控制逻辑的实现。软件层面,需采用梯形图或结构化文本编程,设计分拣流程的逻辑控制程序,并通过模拟调试验证系统稳定性。此外,人机交互界面的设计可提升操作便捷性,例如通过触摸屏实时显示分拣状态、故障报警及参数设置功能,使系统维护更高效。
该系统的应用价值体现在多维度性能提升。通过PLC的实时监控与故障诊断功能,系统可快速定位异常并触发保护机制,避免设备损坏或物料堆积;模块化设计则支持功能扩展,例如增加新的分拣规则或适配不同规格物料时,仅需调整PLC程序或增配传感器,无需大规模改造硬件。实际案例表明,采用此类系统的企业分拣效率可提升数倍,同时误分拣率显著降低,为工业自动化升级提供了可复制的技术路径。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论
[
展开所有评论
]
上一篇
基于PROE的健身器材滑步机的运动仿真
下一篇
基于PLC的液位控制系统的设计(论文+外文翻译+开题报告+文献综述)
全部
2D/3D/图纸
机械设计资料
收录软文
最近更新
1
方刀架工艺课程设计(说明书+任务书+CAD图纸+21张工序卡+工艺卡)
2
方刀架(P276)零件机械加工工艺规程及典型夹具设计
3
工艺毕业设计-29323联轴器的加工设计(全套设计及CAD图纸)
4
工艺夹具设计-飞锤支架零件的机械加工工艺及夹具设计【铣18槽】(全套)
5
工艺夹具毕业设计-差速器壳体工艺及工装设计(CAD图纸及论文)
6
工艺夹具-铣床工作台机械加工工艺及铣削T形槽夹具设计(论文 CAD图纸 开题报告 工艺卡……)
7
工艺夹具-连接座的数控工艺及主要工序工装设计(论文 CAD图纸 三维图 工序卡 开题报告 数控程序)
8
工艺夹具-车床拨叉 共7套打包下载 说明书 CAD图纸 过程卡 过程卡……
9
工艺夹具-车床小刀架机械加工工艺及镗孔的夹具设计
10
工艺夹具-弹簧吊耳零件工艺及加工Φ30 两孔夹具设计
买家指南
如何注册
如何购买
搜索商品
支付方式
卖家指南
如何出售
收费标准
入驻签约
安全交易
钓鱼防骗
预防盗号
谨防诈骗
实名认证
常见问题
如何充值
如何提现
真假客服
忘记密码
服务中心
我要咨询
我要建议
我要投诉
QQ客服
网站首页
|
关于我们
|
广告合作
|
联系我们
|
隐私条款
|
免责声明
|
网站地图
CopyRight 2014-2024 设计帮帮网 |
闽ICP备2024057214号
咨询热线
优先咨询网站“在线客服”,若不在线请在电脑端“工单管理””发起工单”