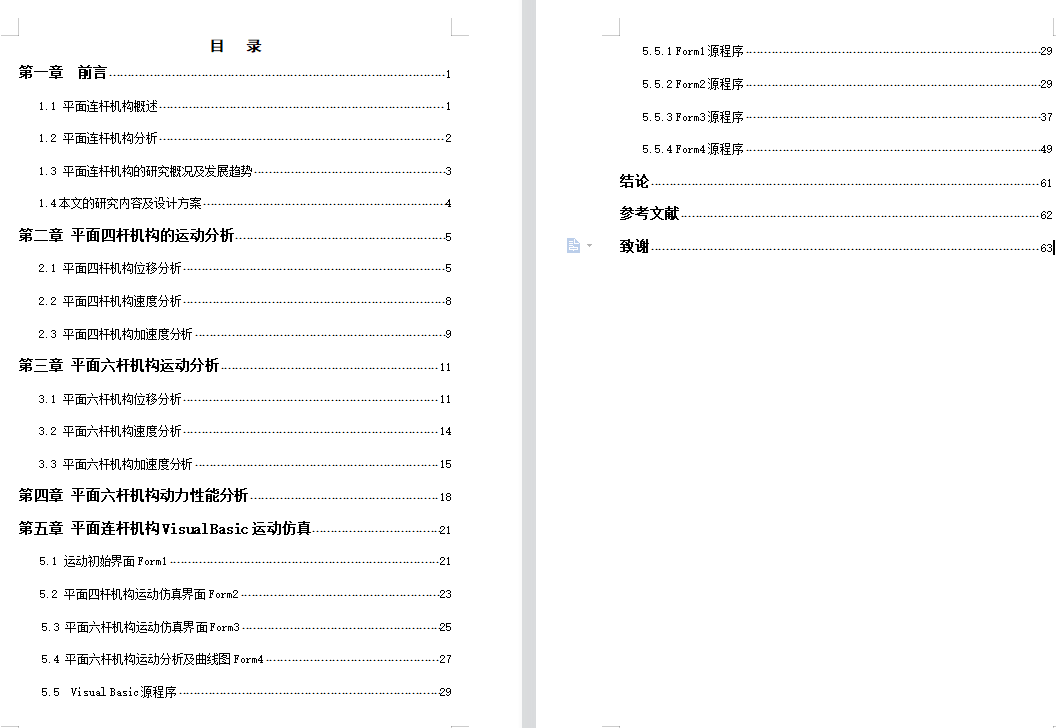
平面六杆机构的运动仿真(毕业论文+CAD图纸+开题报告+外文翻译)
内容
平面六杆机构作为机械传动领域的重要构件,其运动特性直接影响机械系统的整体性能。该机构由六个刚性杆件通过转动副或移动副连接形成闭合环路,通过调整杆长比例与铰链位置,可实现复杂轨迹输出与多自由度运动控制。相较于四杆机构,六杆机构因杆件数量增加,运动形式更为多样,能够满足非线性运动规律、多工位切换等特殊需求,在机器人关节、仿生机械、自动化装备等领域具有显著应用价值。其核心作用在于通过结构优化实现运动轨迹的精准设计与动态调整,为复杂机械动作的实现提供基础支撑。
运动仿真分析是研究平面六杆机构的关键环节。通过建立数学模型并借助计算机辅助工具,可模拟机构在不同输入条件下的运动状态,直观呈现杆件位移、速度与加速度变化规律。这一过程不仅有助于验证理论设计的合理性,还能提前发现干涉、振动等潜在问题,为结构优化提供数据支持。仿真结果可指导杆件尺寸调整、铰链位置优化及驱动方式选择,显著缩短设计周期并降低试制成本。
CAD图纸的绘制是平面六杆机构设计落地的核心步骤。图纸需精确标注杆件长度、铰链坐标、连接方式等关键参数,并明确装配关系与运动约束条件。通过三维建模与二维工程图结合的方式,可全面展示机构结构特征与工作原理,为后续加工制造与装配调试提供标准化依据。图纸中还需包含运动范围标注、极限位置示意等内容,确保设计意图的完整传递。
开题报告与外文翻译的撰写则侧重于学术规范与技术前沿的衔接。开题报告需明确研究背景、目标与方法,梳理现有技术的局限性,提出创新点与实施路径;外文翻译则通过引入国际权威文献,拓展技术视野,为研究提供理论支撑。两者共同构成研究的逻辑框架,确保研究方向的科学性与可行性。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













