喷涂机器人设计毕业设计全套【含CAD图+优秀论文+开题报告+任务书+翻译……】
内容
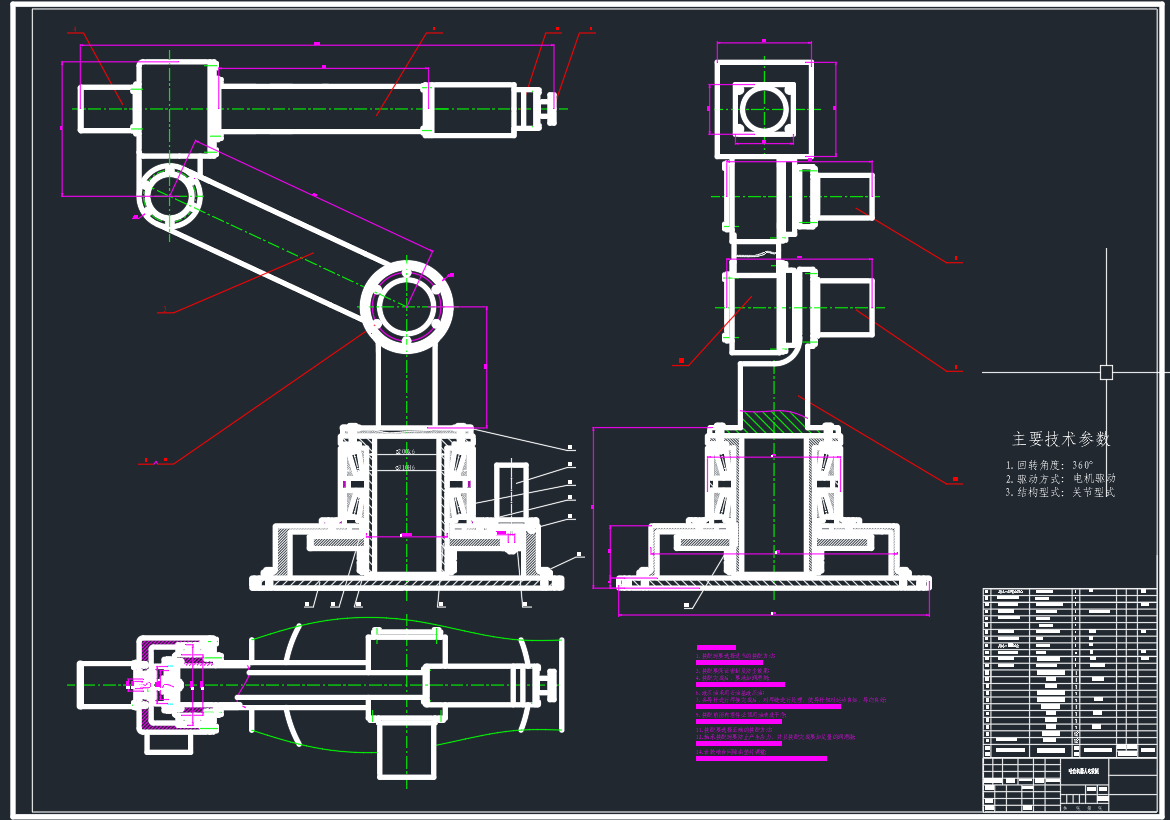
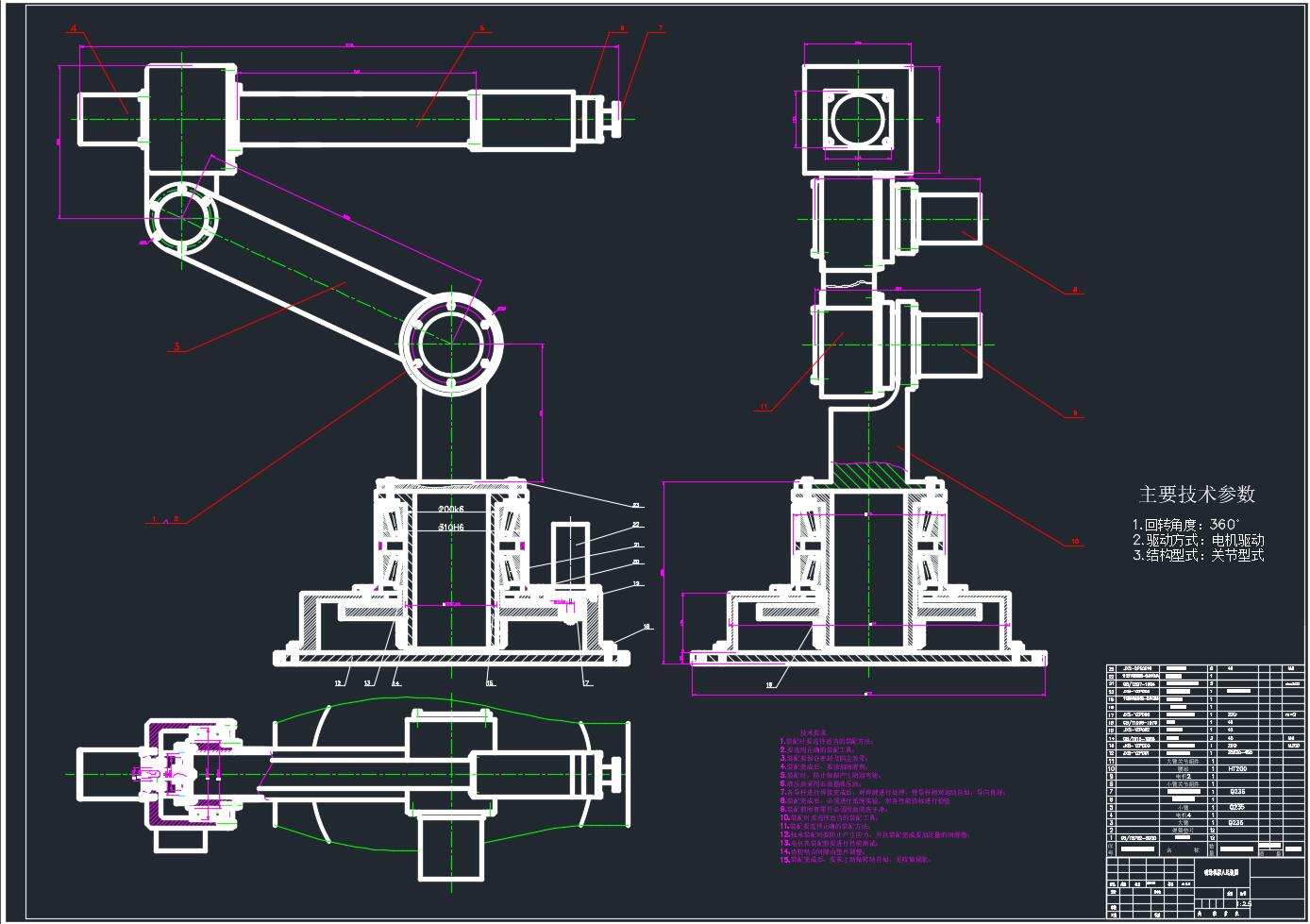
喷涂机器人设计作为现代工业自动化领域的关键课题,其核心在于通过机械结构、运动控制与工艺参数的协同优化,实现涂层均匀性、覆盖效率与材料利用率的综合提升。该设计涵盖机械本体设计、驱动系统选型、控制系统开发及喷涂工艺适配四大模块,需综合运用机械原理、材料力学、自动控制理论等多学科知识。机械本体设计需重点考虑工作空间覆盖范围、负载能力与运动灵活性,通过有限元分析优化关键部件的刚度与轻量化设计;驱动系统则需根据运动精度要求选择伺服电机或步进电机,并配置减速器与传动机构以实现精准定位;控制系统开发需集成路径规划算法与喷涂参数实时调节功能,确保机器人能根据工件表面曲率自动调整喷枪角度与涂料流量。
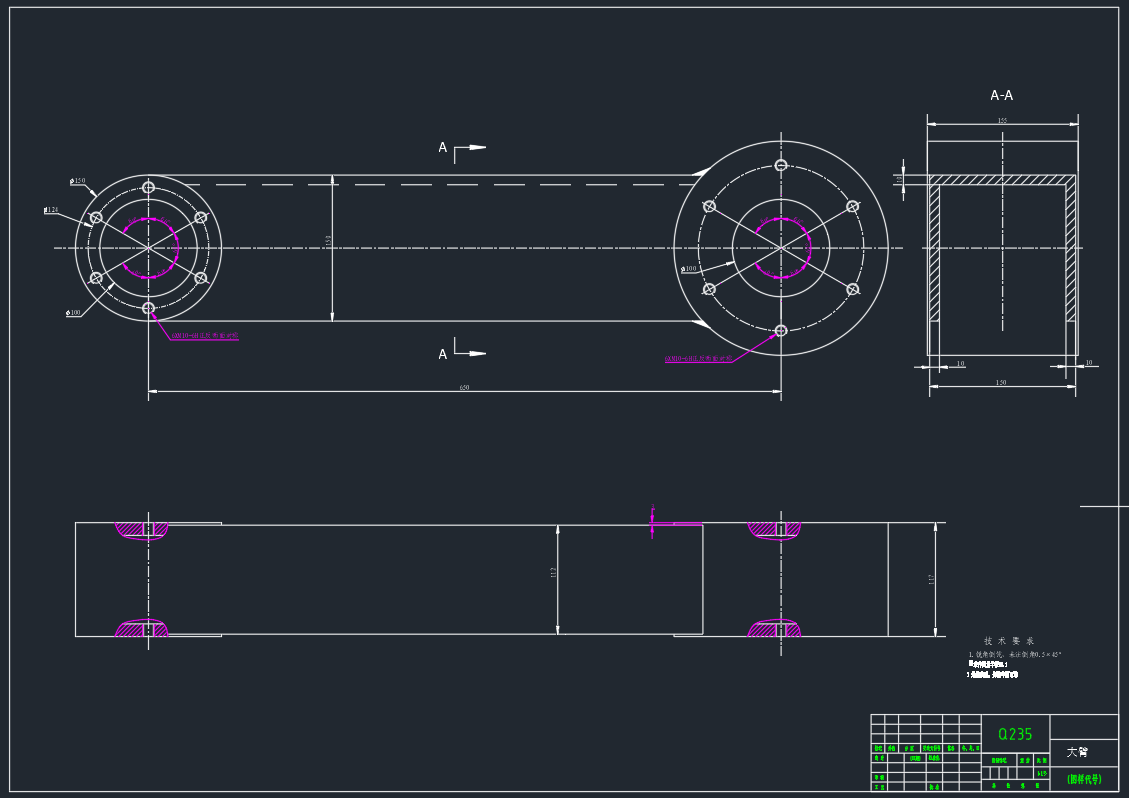
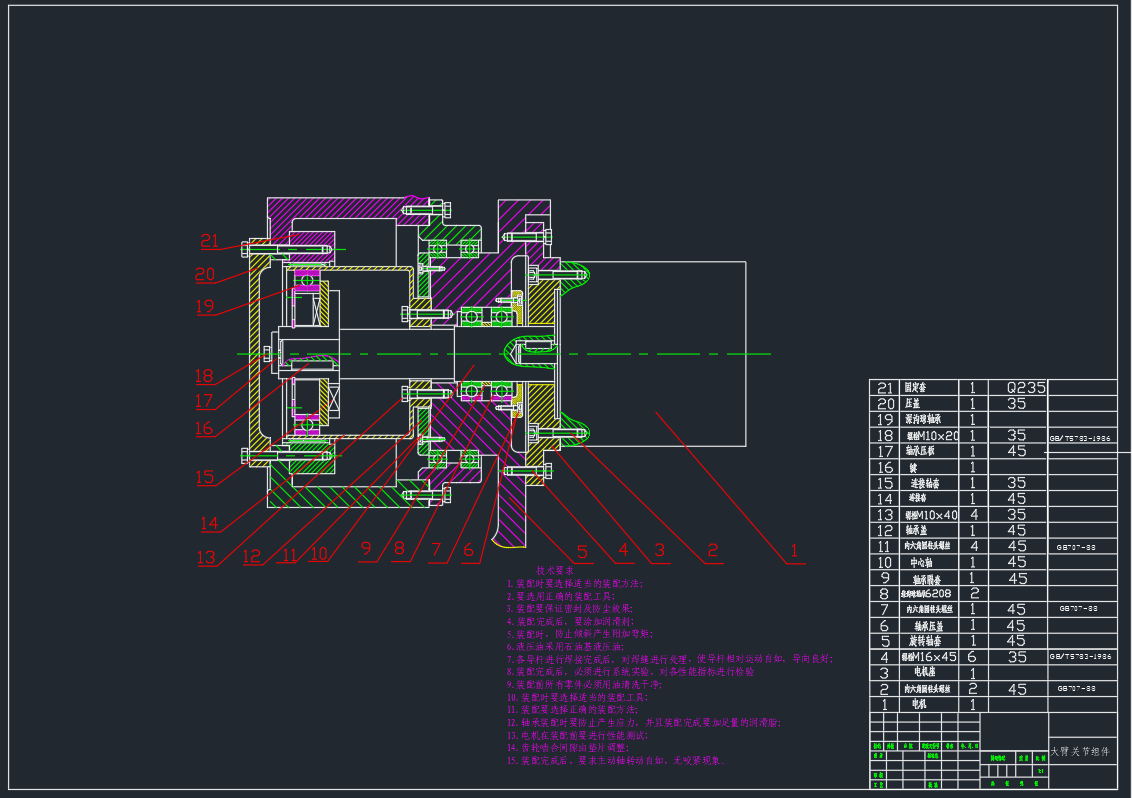
学习资料中的CAD图纸详细展示了机器人各部件的装配关系与尺寸链设计,包括多自由度机械臂的关节结构、喷枪夹持装置的定位方式及底座的防倾覆设计。论文部分通过理论分析与实验验证,对比了不同喷涂轨迹规划策略对涂层厚度均匀性的影响,并提出了基于视觉反馈的在线修正方法。开题报告明确了设计目标与技术路线,任务书则细化了各阶段的时间节点与交付成果,翻译文件则提供了国外同类设计的最新研究动态,为技术方案优化提供参考。
该设计方案的实施可显著缩短喷涂工艺的调试周期,降低对操作人员技能水平的依赖,同时通过减少涂料飞溅与过喷现象,实现环保与经济效益的双重提升。其关键创新点在于将离线编程技术与实时传感器数据融合,使机器人能适应不同形状工件的喷涂需求,避免因频繁示教导致的生产中断。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













