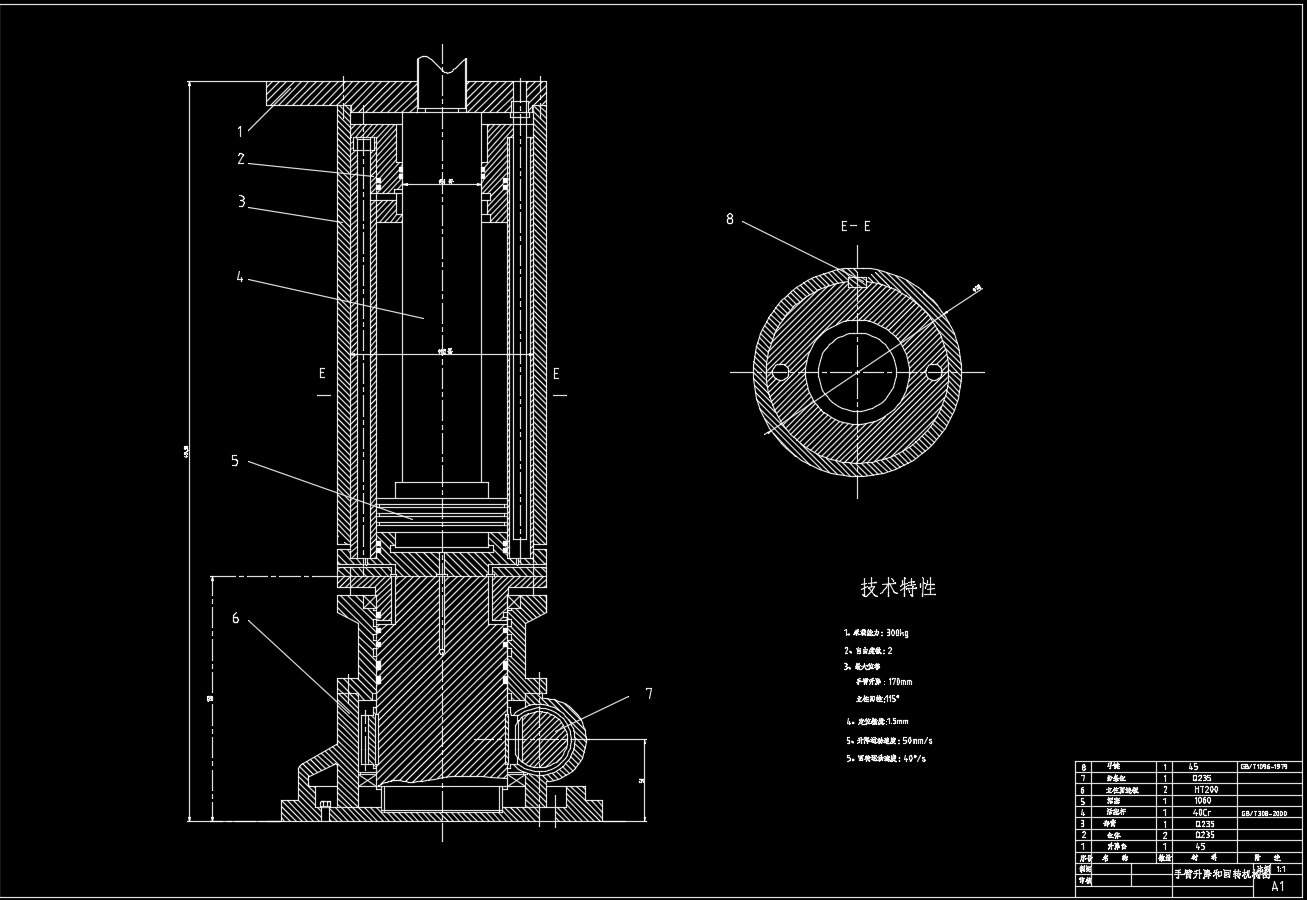
机器人手臂升降和回转机构图
内容
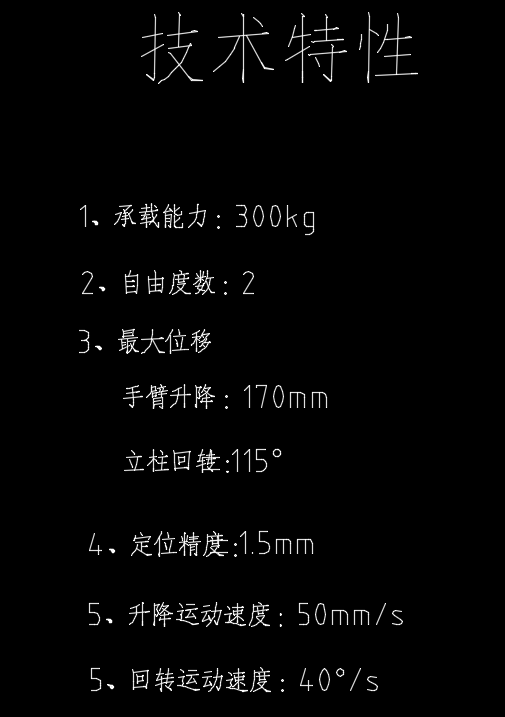
机器人手臂的升降与回转机构是机械臂实现空间灵活操作的核心模块,二者协同工作可显著扩展末端执行器的工作范围。升降机构通过垂直方向的线性运动调整机械臂的高度,其核心作用在于适应不同作业场景的垂直高度需求,例如在仓储物流中完成货架不同层位的货物抓取,或在装配线上实现高低位置零件的精准对接。该机构通常采用滚珠丝杠、齿轮齿条或同步带等传动方式,通过电机驱动实现平稳的直线运动,其设计需兼顾承载能力与运动精度,确保在负载变化时仍能保持定位准确性。
回转机构则负责机械臂在水平面内的旋转运动,其核心功能是调整末端执行器的方位角,使机械臂能够绕固定轴线完成360度旋转。这一特性在焊接、喷涂等需要连续轨迹控制的场景中尤为重要,例如汽车车身焊接时,回转机构可驱动焊枪沿曲面轨迹移动,避免因机械臂本体转动导致的干涉问题。常见的回转机构采用谐波减速器或RV减速器,通过高减速比设计将电机扭矩放大,同时利用交叉滚子轴承支撑旋转部件,确保回转运动的刚性与回差控制。
升降与回转机构的集成设计需重点解决运动耦合问题。例如,当升降机构运动时,回转机构的惯性力可能引发振动,需通过优化结构刚度或增加阻尼元件进行抑制;而回转运动产生的离心力则可能影响升降机构的负载分布,需通过动态平衡分析确保系统稳定性。此外,二者的驱动系统通常采用独立控制策略,通过伺服电机与编码器的闭环反馈实现位置精度控制,部分场景还会集成力传感器以实现柔顺控制,避免因碰撞导致的结构损伤。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













