履带式管道机器人(CAD)
内容
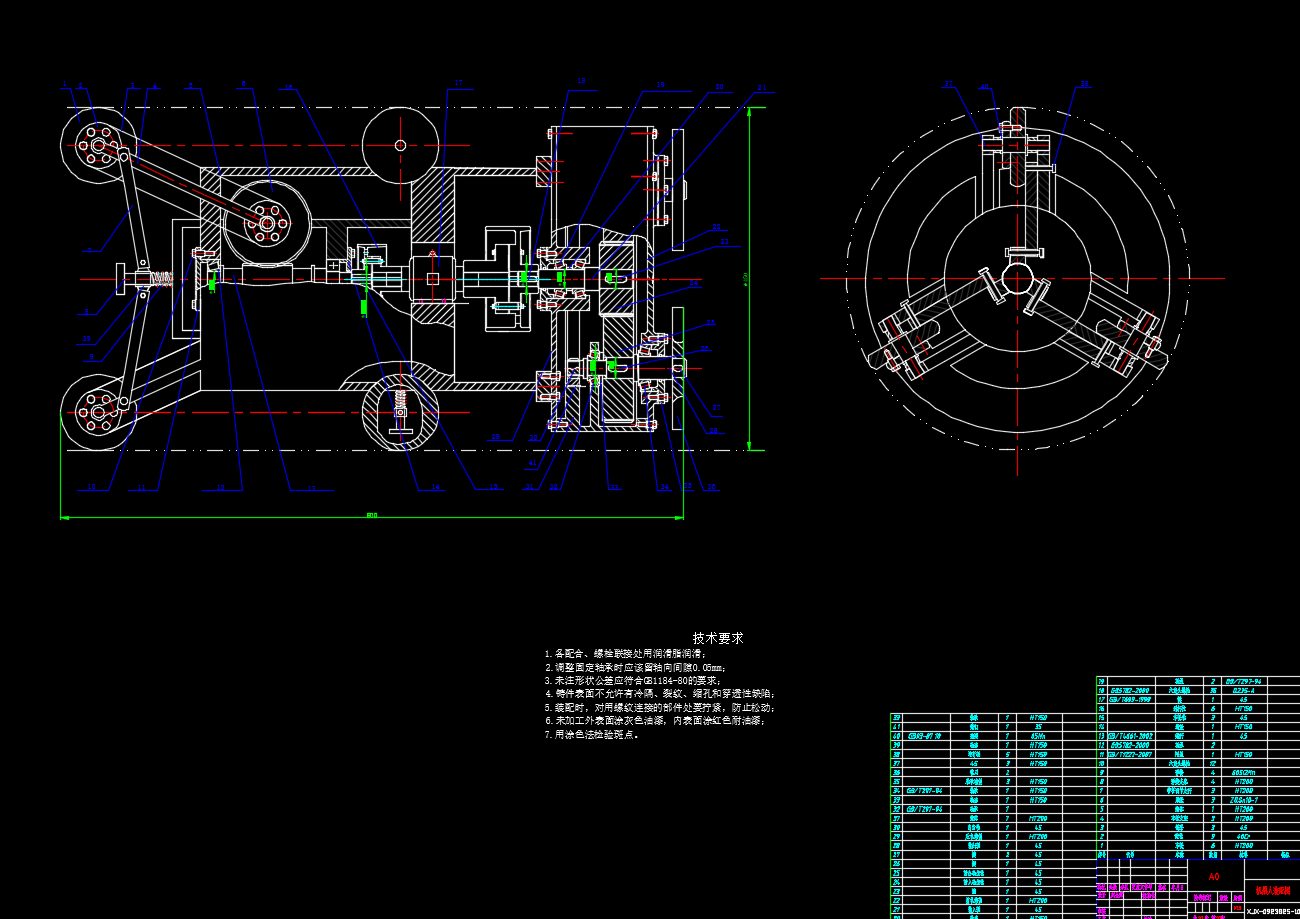
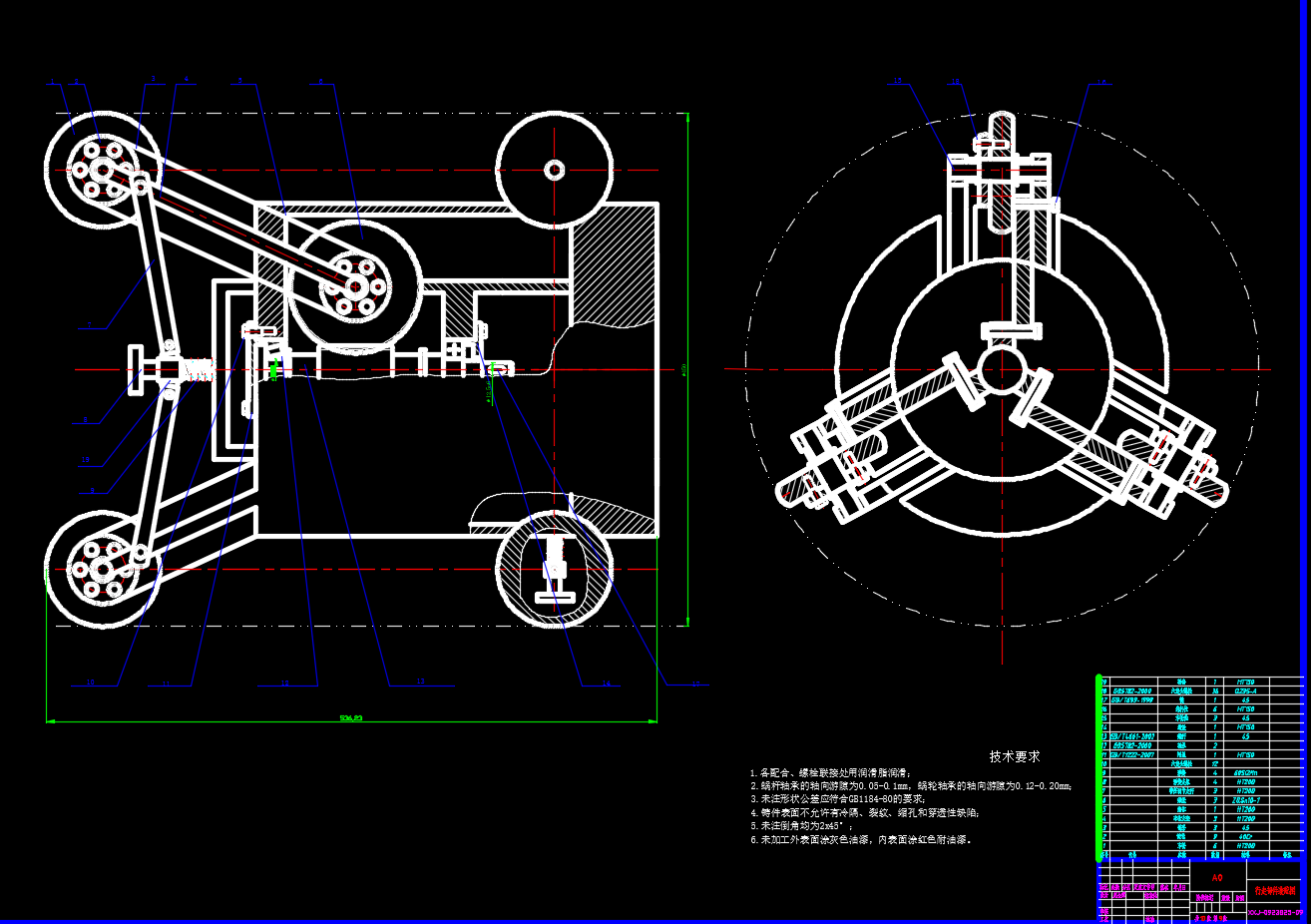
履带式管道机器人作为特种作业装备的重要分支,其核心作用在于解决传统检测手段在复杂管道环境中的局限性。通过模块化履带底盘与自适应驱动系统的集成设计,该设备可稳定穿越弯曲、变径或存在障碍物的管道网络,尤其适用于城市地下管网、工业输油管道等场景的定期巡检与故障排查。其履带结构通过增大接触面积降低压强,配合高扭矩驱动电机,能有效克服泥沙淤积、结垢附着等阻力,确保在非结构化环境中持续作业。
在功能实现层面,该机器人通常搭载多类型传感器阵列,包括高清摄像头、超声波测厚仪、红外热成像模块等,可同步采集管道内壁形貌、腐蚀程度、泄漏位置等关键数据。部分型号还集成机械臂单元,支持对轻微堵塞物进行清理或对破损部位进行临时封堵,显著提升作业效率。数据传输方面,采用抗干扰无线通信技术,确保在金属管道等屏蔽环境中实时回传检测信息,为运维决策提供可靠依据。
结构设计上,履带式管道机器人遵循轻量化与高强度原则,主体框架多选用航空铝合金或碳纤维复合材料,既保证结构刚性又降低整体重量。驱动系统采用分布式布局,每条履带配备独立电机,通过差速控制实现灵活转向,甚至可在垂直管道中完成攀爬动作。密封设计方面,关键部件采用双重防护结构,配合动态压力补偿技术,确保在高压水流或化学介质环境中长期稳定运行。
从应用价值看,该设备可替代人工进入危险管道环境,大幅降低作业风险;同时通过自动化巡检显著缩短检测周期,减少因管道故障导致的生产中断或环境污染事故。其模块化设计理念还支持快速更换功能模块,适应不同管径、材质或检测需求的场景,具有较高的经济性与扩展性。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













