爬楼梯机器人制作模型(solidworks+stp)
内容
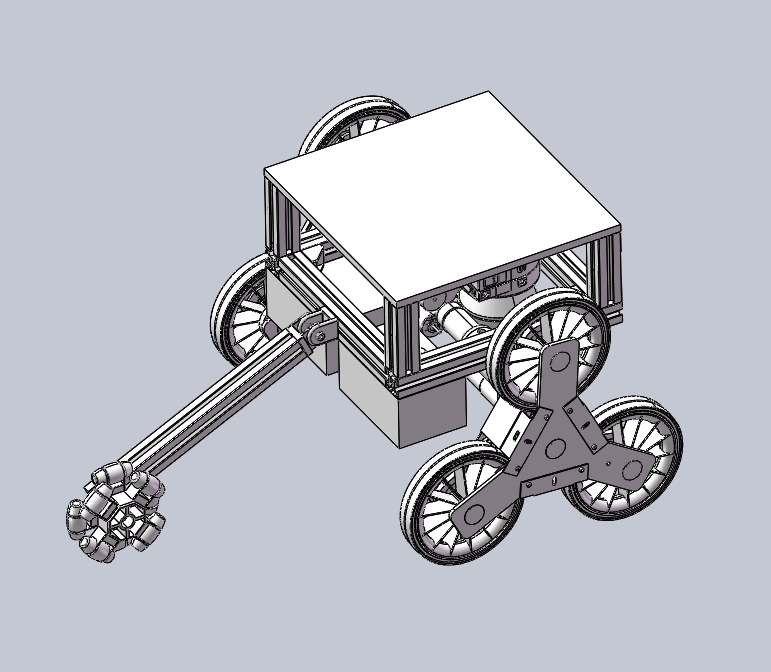
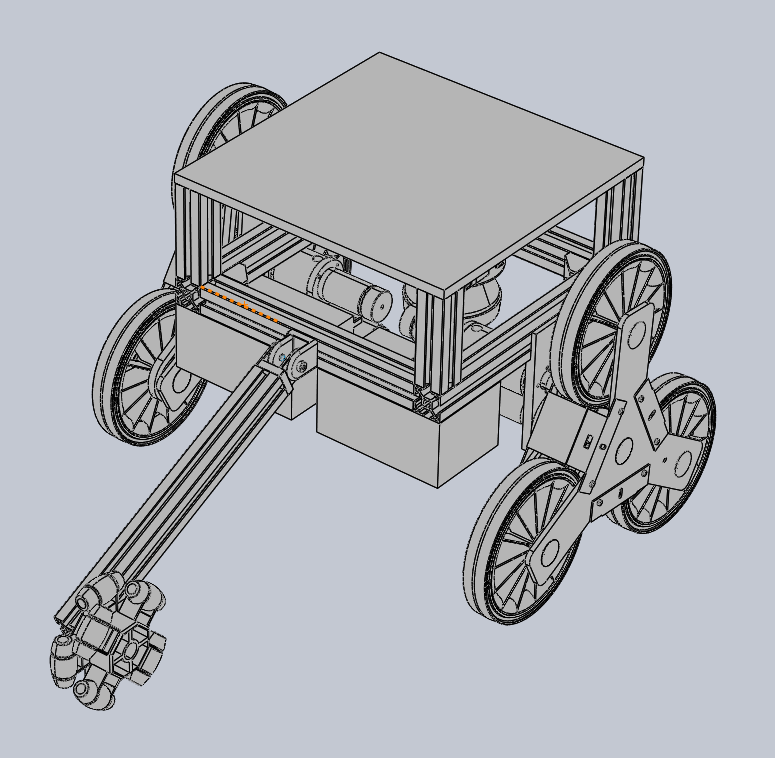
爬楼梯机器人模型的设计与制作,是机械结构与运动功能结合的典型实践。其核心作用在于通过模拟人体攀爬动作,实现复杂地形下的稳定移动,尤其适用于无电梯建筑、野外救援等场景。模型设计需兼顾力学平衡与动力传输效率,确保各部件在交替承重时保持结构稳定性。SolidWorks作为三维建模工具,可直观呈现机器人的整体架构,包括腿部关节、驱动模块及支撑框架的布局;STP格式则便于跨平台数据交换,为后续优化或制造提供通用基础。
模型的关键结构包含可伸缩腿部、旋转关节及防滑足端。腿部采用多连杆机构,通过角度调节适应不同台阶高度;关节处设计限位装置,避免运动超程导致的结构损坏;足端覆盖高摩擦材料,增强与接触面的附着力。动力系统通常集成微型电机与减速器,通过齿轮或同步带传递扭矩,驱动腿部完成抬升、迈步、落地的循环动作。这些部件的协同设计需反复验证力学性能,确保模型在负载状态下仍能保持运动流畅性。
在SolidWorks中构建模型时,需遵循自下而上的设计原则:先定义基础零件,再通过装配体组合各部件,最后添加运动副模拟实际动作。此流程可快速定位设计缺陷,例如关节干涉或重心偏移问题。STP格式的导出则需检查模型完整性,避免因数据转换导致特征丢失。对于复杂曲面或精细结构,可分段建模后合并,以平衡精度与文件体积。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













