移动机器人(sw三维)
内容
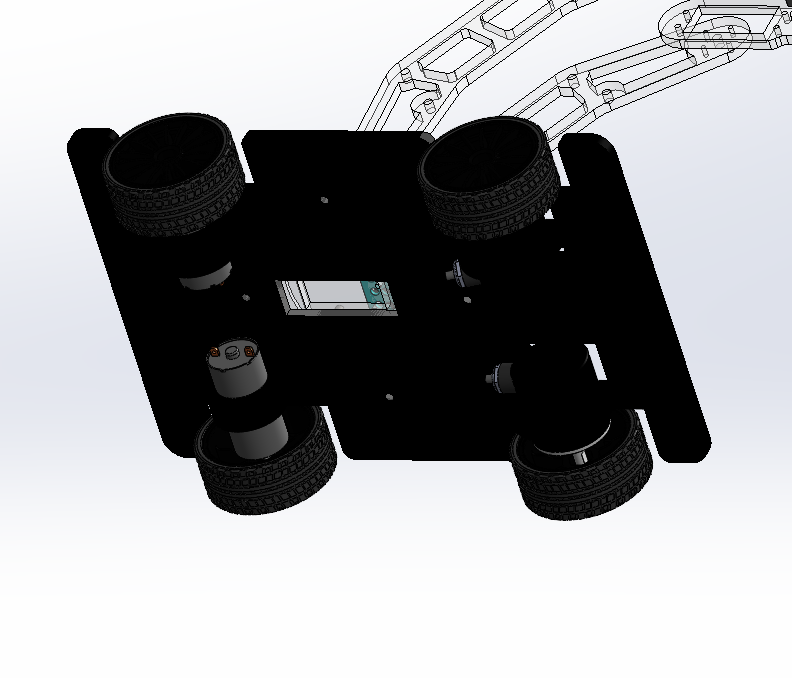
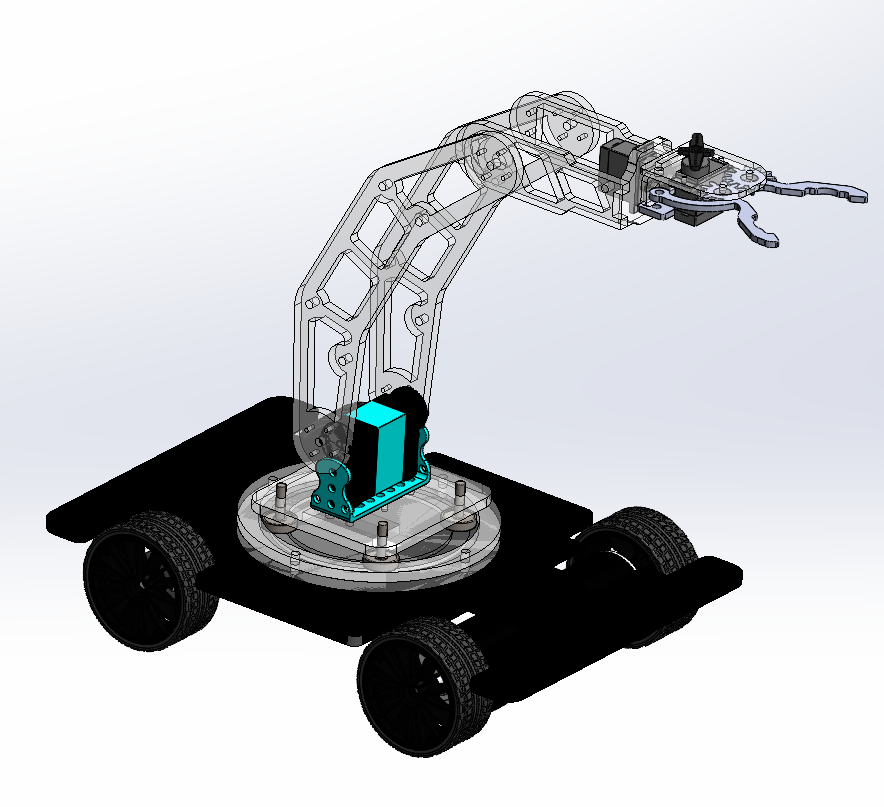
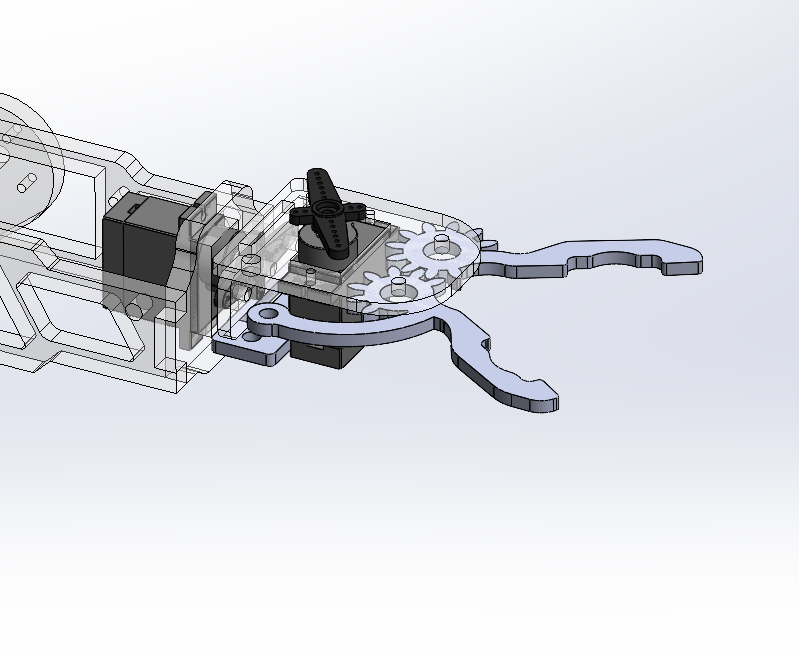
移动机器人在三维空间(SW三维)中的设计与应用,已成为现代工业与科研领域的重要方向。其核心作用在于通过三维建模技术,将机器人的机械结构、运动轨迹及环境交互进行可视化呈现,为设计优化与功能验证提供直观依据。相较于传统二维设计,三维模型能够更精准地描述零件的空间位置关系,避免因视角局限导致的装配冲突,显著提升设计方案的可行性。例如,在复杂机械臂的设计中,三维模型可清晰展示各关节的旋转范围与连杆干涉情况,帮助工程师提前发现潜在问题并调整参数。
在功能验证阶段,移动机器人的三维模型可模拟实际工况下的运动状态。通过动态仿真,工程师能够观察机器人在不同路径规划下的行为表现,分析其避障能力、负载稳定性及能源消耗等关键指标。这种虚拟测试方式不仅降低了物理样机的制作成本,还缩短了实验周期,使设计迭代更加高效。例如,在仓储物流机器人的开发中,三维仿真可快速验证其货架间穿梭的灵活性,为算法优化提供数据支持。
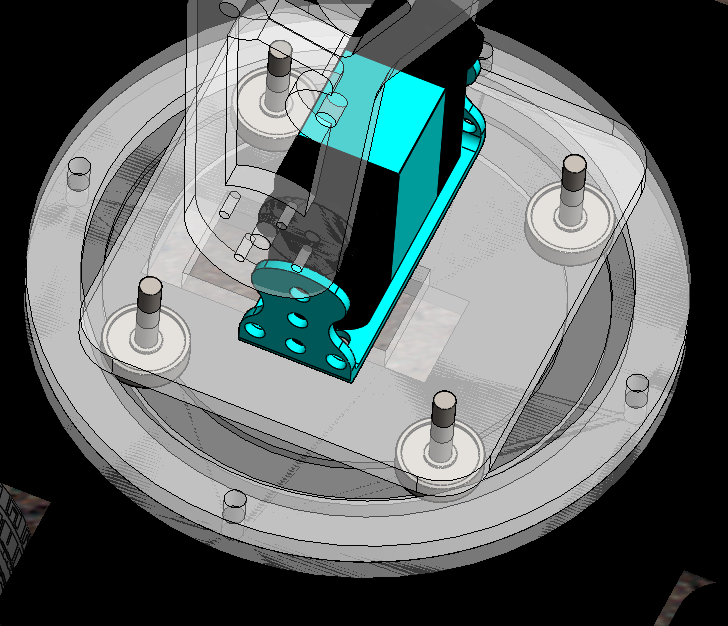
三维设计对移动机器人的模块化开发具有重要推动作用。通过将机器人拆分为驱动单元、传感器模块、控制组件等独立部分,并在三维环境中进行参数化建模,工程师可灵活组合不同模块以适应多样化需求。这种设计模式减少了重复劳动,尤其适用于需要快速定制化开发的场景。例如,服务机器人的底盘与上装结构可通过标准化接口实现快速更换,满足清洁、导览等不同功能需求。
三维设计还为移动机器人的维护与升级提供了便利。基于三维模型生成的爆炸视图与装配动画,可指导现场技术人员快速定位故障零件并完成更换。同时,模型中的材料属性与工艺信息可为后续改进提供参考,例如通过轻量化设计降低能耗,或优化零件结构以提升耐用性。这种全生命周期管理方式,延长了机器人的使用寿命并降低了运维成本。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。
评论













