铸件切边上下料机械手
内容
铸件切边工序中,上下料环节的效率与精度直接影响整体加工质量。传统人工操作易受疲劳、环境等因素干扰,导致定位偏差、节拍不稳定等问题。铸件切边上下料机械手作为自动化解决方案,通过机械结构与控制系统的协同设计,实现了铸件从输送线到切边机床的精准抓取、定位与放置,有效替代人工完成重复性高、劳动强度大的作业任务,为提升加工稳定性提供了关键支撑。
该机械手的核心作用体现在三方面:其一,通过高刚性机械臂与柔性夹爪的组合设计,可适配不同形状、尺寸的铸件抓取需求,避免因零件变形或表面粗糙导致的滑落风险;其二,集成视觉定位系统与力反馈控制模块,可实时监测铸件位置偏差并动态调整抓取力度,确保切边工序中铸件与刀具的相对位置精度;其三,通过预设程序实现多工位协同作业,显著缩短单件加工周期,同时减少人工干预带来的安全风险。
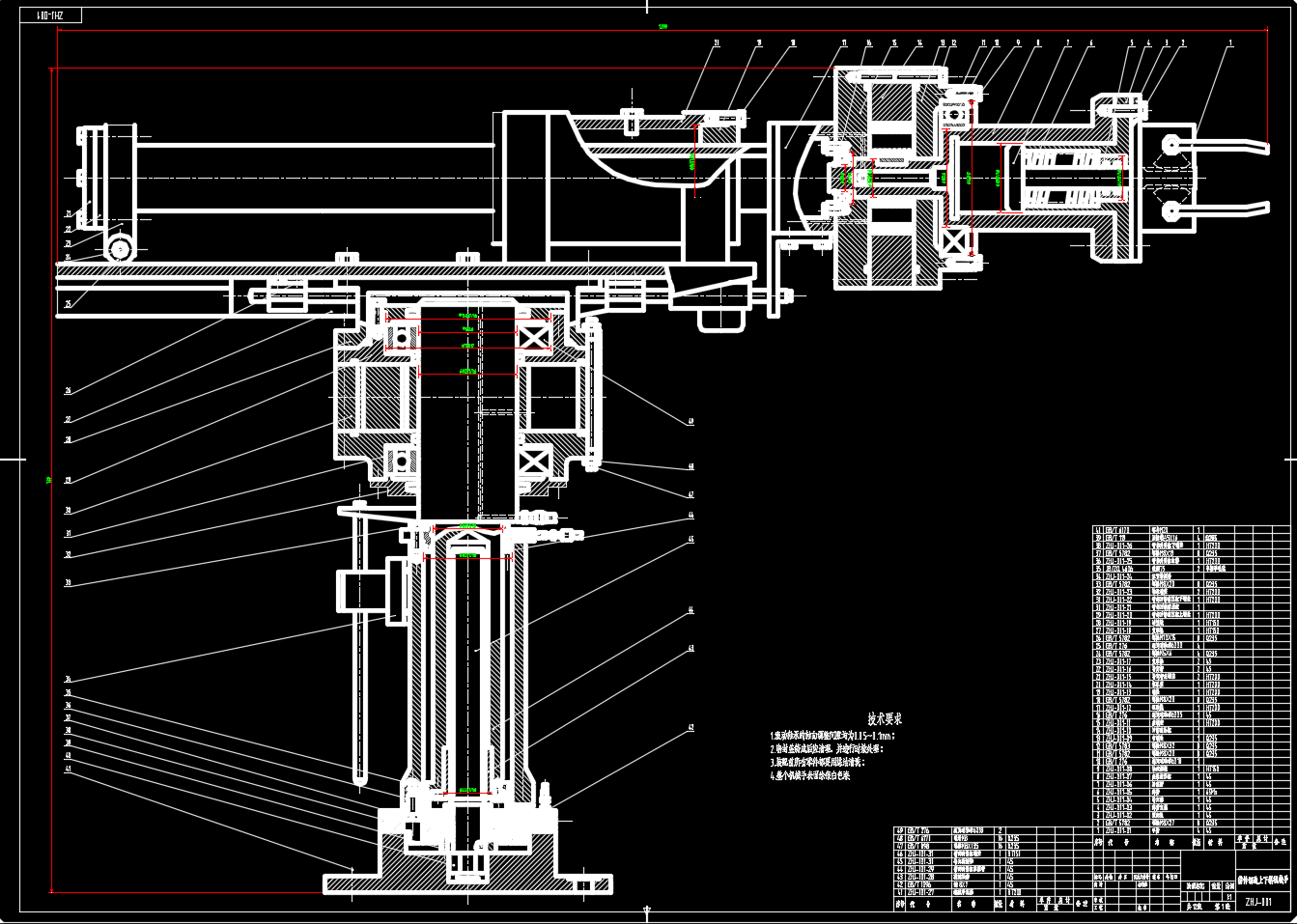
在结构层面,机械手通常采用模块化设计理念,将驱动单元、传动机构与执行末端分离布局,便于根据实际工况调整负载能力与运动范围。例如,针对高温切边环境,可选用耐热涂层材料与封闭式传动结构,延长设备使用寿命;对于空间受限的作业场景,则可通过优化关节布局缩小占用体积。这种设计灵活性使其能够快速适配不同型号的切边机床,降低自动化改造门槛。
控制系统的优化是提升机械手性能的关键。通过引入运动学逆解算法与轨迹规划技术,可确保机械臂在高速运动过程中保持平稳,避免因急停或加速产生的冲击力影响铸件定位。同时,集成故障诊断功能与安全联锁装置,可在设备异常时立即停止运行并发出警报,防止因误操作导致的设备损坏或人员伤害。
本文系统梳理相关主题的核心概念、理论框架与关键思路,助您快速建立整体认知,为后续深入学习与研究探索奠定基础。需要说明的是,本文为概述性资料,详细内容请查阅附件。附件及本文所有内容仅供学习参考,实际应用时请结合自身情况独立设计与调整。

评论













