收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
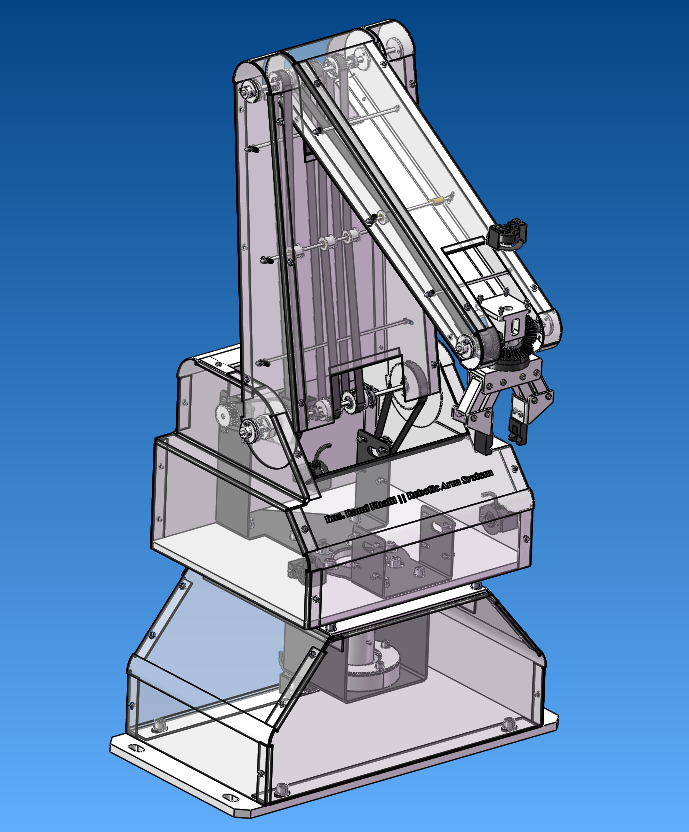
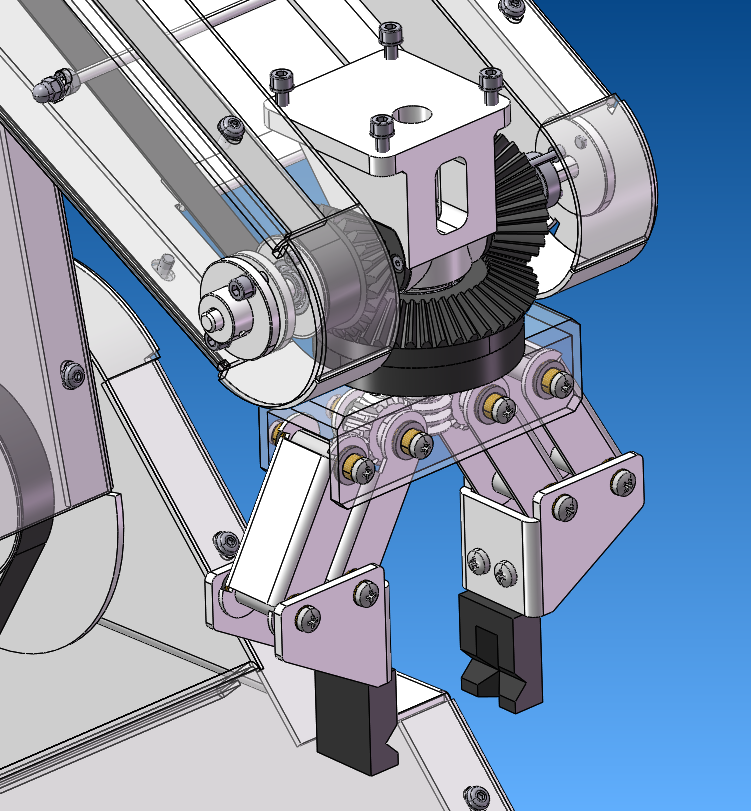
工业机器人手臂(solidworks+proe+x_t)
来源: 阅读:66
网站管理员
发布于 2026-01-26 16:00
查看主页
工业机器人手臂的设计常借助solidworks和proe这类工具,从结构建模到部件优化,一步步搭起手臂的框架。x_t格式则方便不同软件间的模型互通,减少数据转换问题。这些设计过程中的实用资料,能帮着捋顺机械结构逻辑,让手臂在实际应用中更稳当,抓取、搬运这些基础动作也更可靠。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
树脂合成罐施工图
03/18
48
双碱法脱硫工艺流程图
03/18
56
ABB喷涂机器人
03/08
48
河南某市8500平米、主体七层、 裙房六层框架办公楼(含计算书、开题报告、建筑结构图、PKPM模型)
01/30
53
笔记本电脑的智能底座设计(论文+开题报告+任务书+中期报告+答辩PPT+程序+电路图)
02/15
56
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn