收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
机械手-两足行走机器人——行走结构部分设计(说明书+CAD图纸+三维图+开题报告+任务书+答辩PPT……)
来源: 阅读:56
网站管理员
发布于 2026-01-20 21:00
查看主页
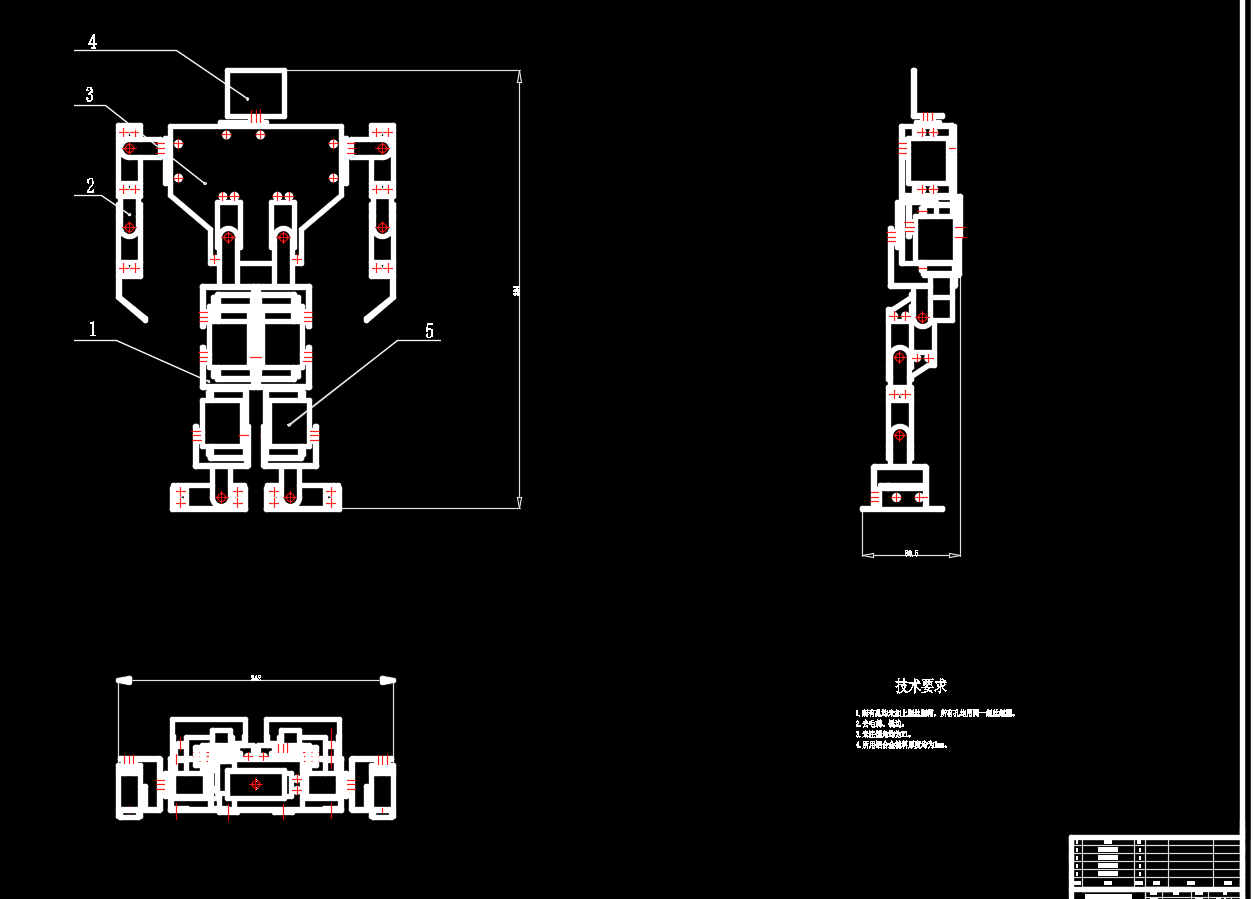
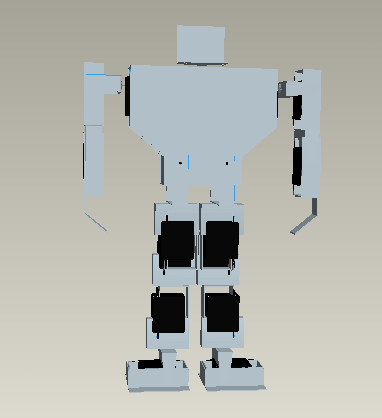
行走结构是两足机器人实现稳定移动的核心,设计需结合机械原理与运动学分析,通过优化腿部连杆机构、合理配置驱动组件、匹配足部缓冲结构,可系统呈现从概念设计到零部件选型的全过程。相关学习资料包含设计说明、工程图纸及答辩材料,为相关设计提供直观参考,帮助理解多学科知识在机器人行走系统中的综合应用,显著缩短设计周期,整套学习资料覆盖行走结构设计各环节,助力构建完整的设计认知体系。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
ZQ350减速器箱体加工工艺及夹具设计(说明书+CAD图纸+工序卡+过程卡)
04/09
56
ZY1362玉米剥皮机设计(全套8张CAD图+说明书+外文翻译)
04/09
28
ZQ-100型钻杆动力钳背钳设计
04/09
33
滚筒式输送机(说明书57页+Pro三维图)
03/29
33
锁壳冷冲压模具设计(说明书+CAD图纸+开题报告+任务书+评阅评语表+答辩资格审查表+中期检查表+指导教师评阅表)
01/28
50
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn