收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
机械手-两足行走机器人——臂部结构部分设计(说明书+CAD图纸+开题报告+任务书+外文翻译……)
来源: 阅读:73
网站管理员
发布于 2026-01-20 20:36
查看主页
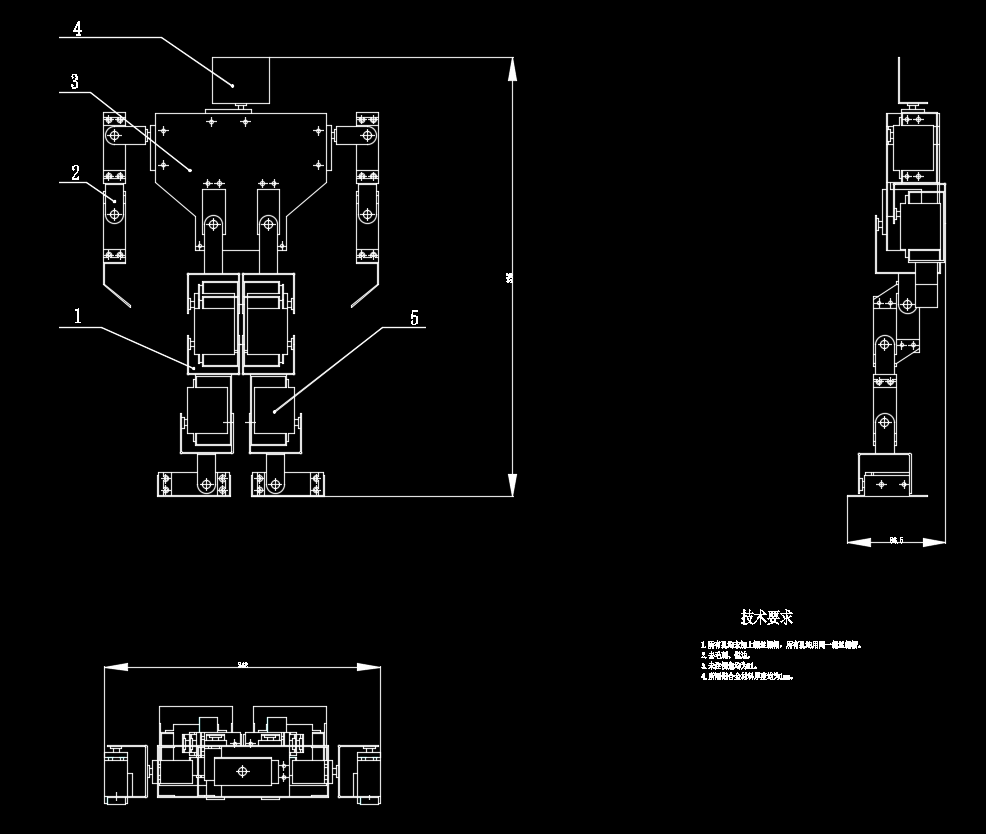
机械手-两足行走机器人的臂部结构设计,核心在于实现抓取与操作功能,需兼顾机械强度与运动精度。相关设计说明书、CAD图纸、开题报告、任务书及外文翻译等,为臂部结构设计提供依据,助力明确设计目标与技术路线。通过优化结构方案,可显著缩短设计周期,减少零件冗余。这些实用资料系统呈现了臂部设计的完整思路与技术细节。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
三级减速器(A0)
01/22
64
工厂平面布置图
03/19
35
自动捆扎机(SolidWorks——共650多个零部件)
01/13
92
混凝土搅拌站用的称重皮带秤
01/17
71
机器人手臂升降和回转机构图
03/09
45
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn