收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
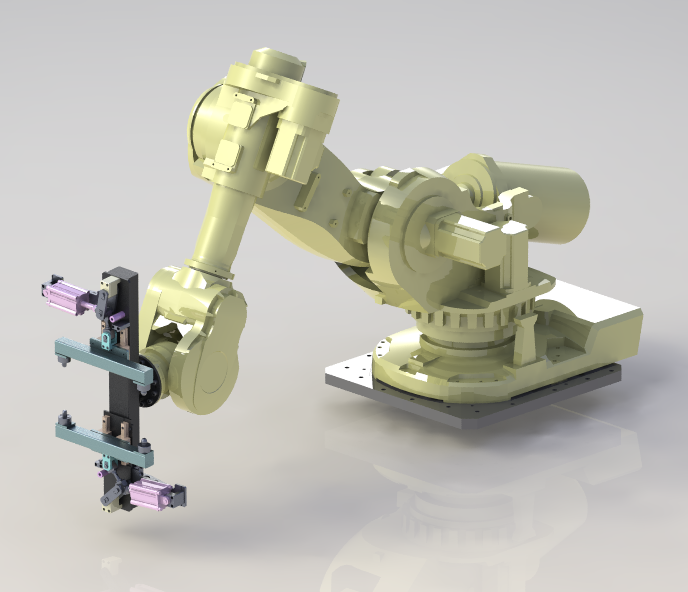
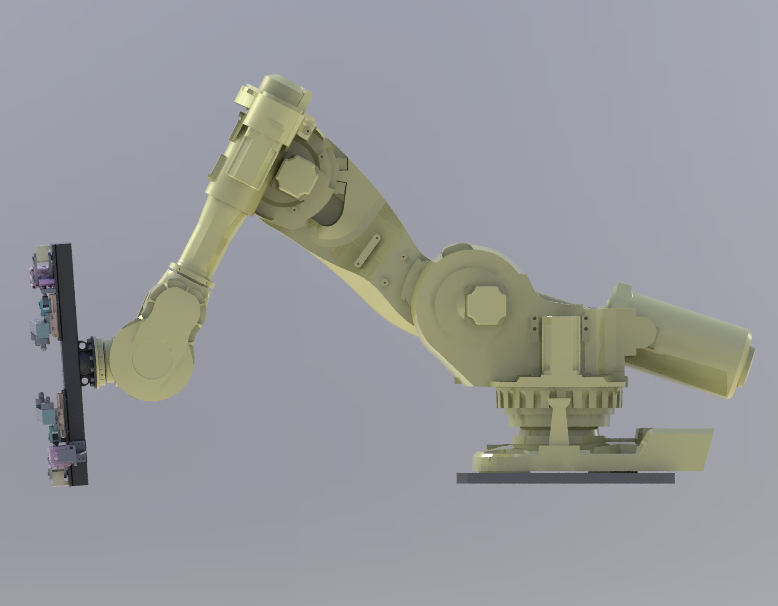
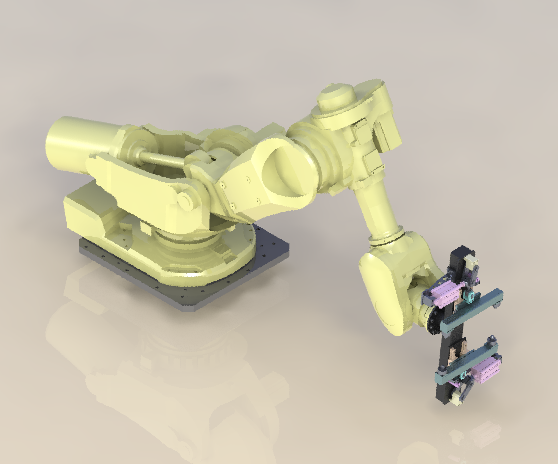
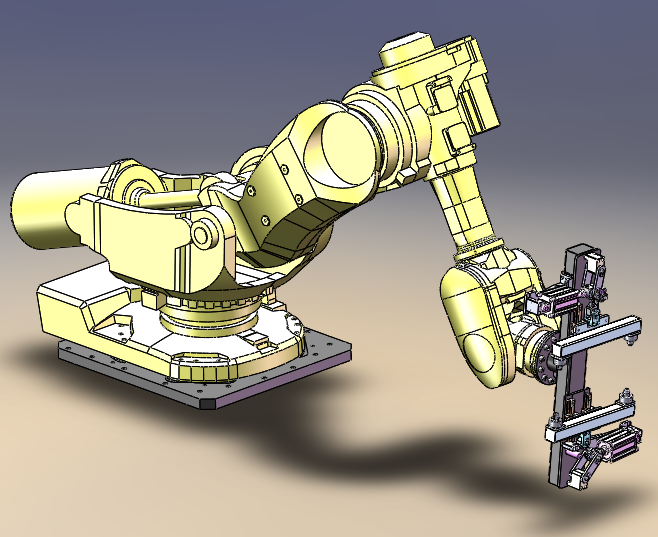
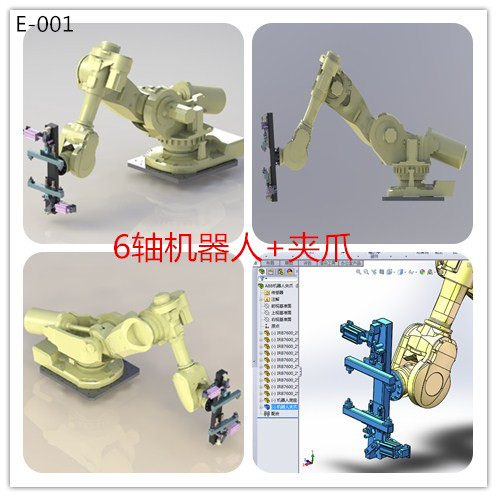
E-001 ABB机器人夹爪(SolidWorks)
来源: 阅读:63
网站管理员
发布于 2026-01-14 13:59
查看主页
基于SolidWorks设计的E-001 ABB机器人夹爪,主要用于实现对工件的稳定抓取与移载操作。通过参数化建模可快速调整夹爪尺寸,适配不同规格工件,同时借助装配体功能检查部件干涉,减少设计疏漏,显著缩短验证周期。相关学习资料包含三维模型与工程图,可直接用于设计参考。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
双摇臂全地形履带小车 SolidWorks三维
01/25
58
150ZJ-50 渣浆泵
02/25
47
硝酸尾气处理工程工艺
02/10
65
毕业设计-旋转门的设计(毕业论文+CAD装配,零件图+接线图+梯形图)
04/09
43
气门摇臂轴支座生产线设计【说明书+CAD图纸+开题报告+任务书+过程卡、工序卡】
02/04
51
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn