收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
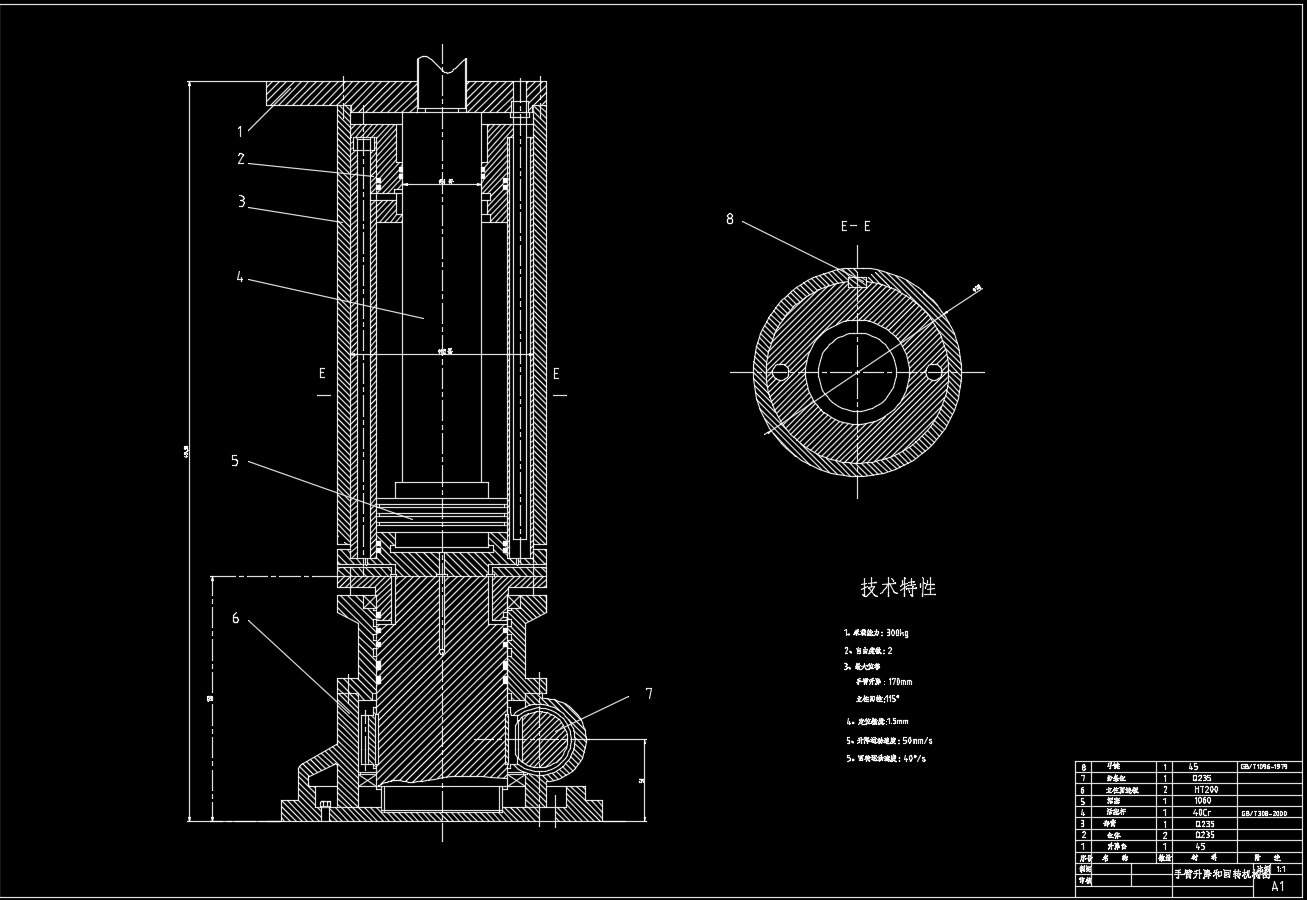
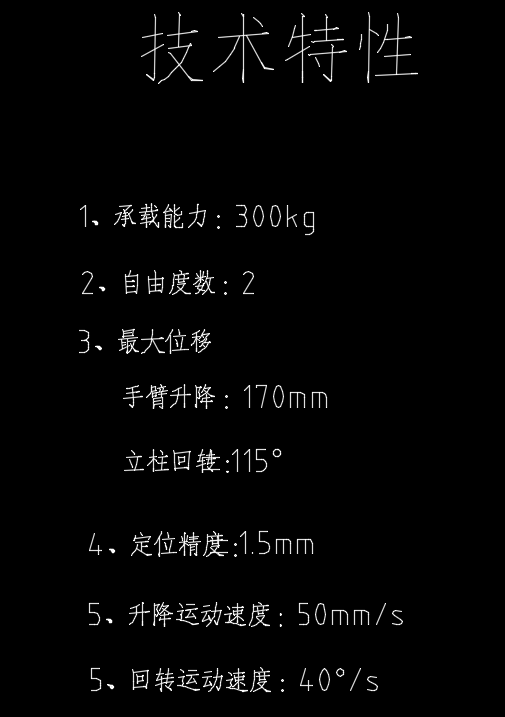
机器人手臂升降和回转机构图
来源: 阅读:93
网站管理员
发布于 2026-01-13 00:59
查看主页
机器人手臂升降和回转机构图直观呈现了升降与回转两大核心运动模块的机械构造。升降模块通过线性驱动组件实现手臂在垂直方向的位移调节,扩展作业高度范围;回转模块借助旋转关节与驱动装置,完成水平方向的360度姿态调整,确保作业半径内的灵活覆盖。二者协同配合,使机器人手臂能在三维空间内精准定位,有效提升作业效率与空间利用率,是理解机器人手臂运动原理的重要学习资料。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
【6层】3116.88平米框架办公楼毕业设计(计算书、建筑、结构施工图)
01/31
65
味精发酵设计说明书及CAD图
04/01
36
铁路综合枢纽人行天桥施工图设计CAD,XX人行天桥工程图纸
02/09
59
KoopB型钢球式无级变速器结构设计毕业设计
02/07
57
桔园除草机的设计(毕业论文+CAD图纸……)
02/06
57
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn