收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
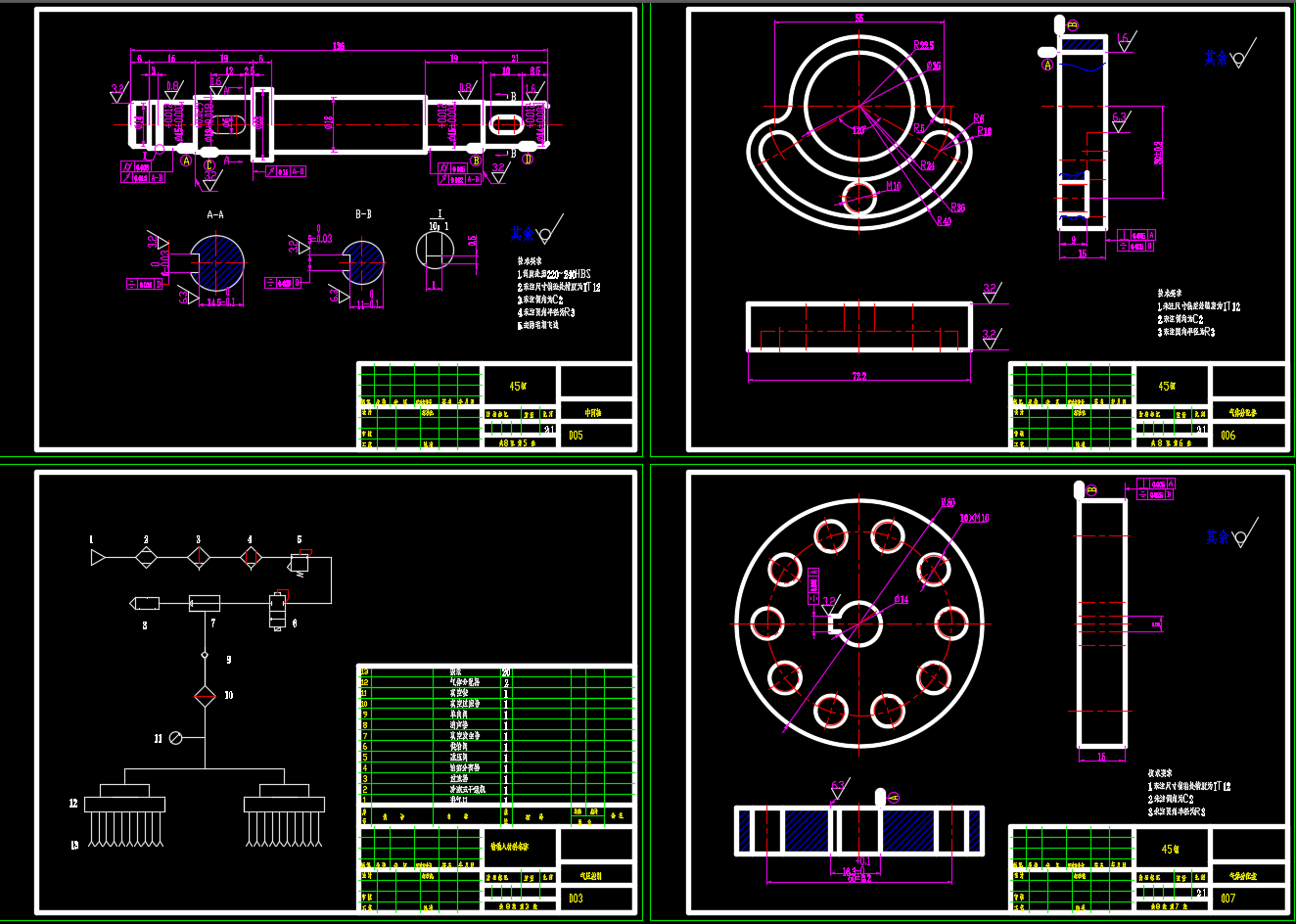
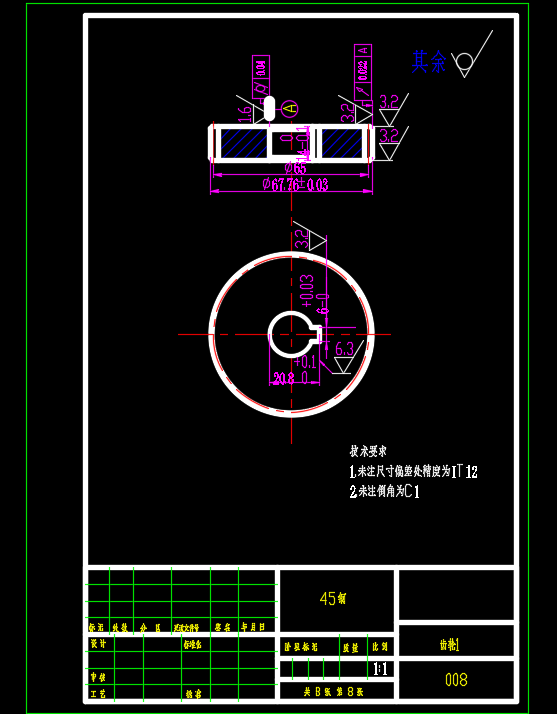
履带式吸附爬壁机器人设计 壁式清洗清洁机器人机械手(设计说明书+CAD图纸)
来源: 阅读:78
网站管理员
发布于 2026-01-08 14:59
查看主页
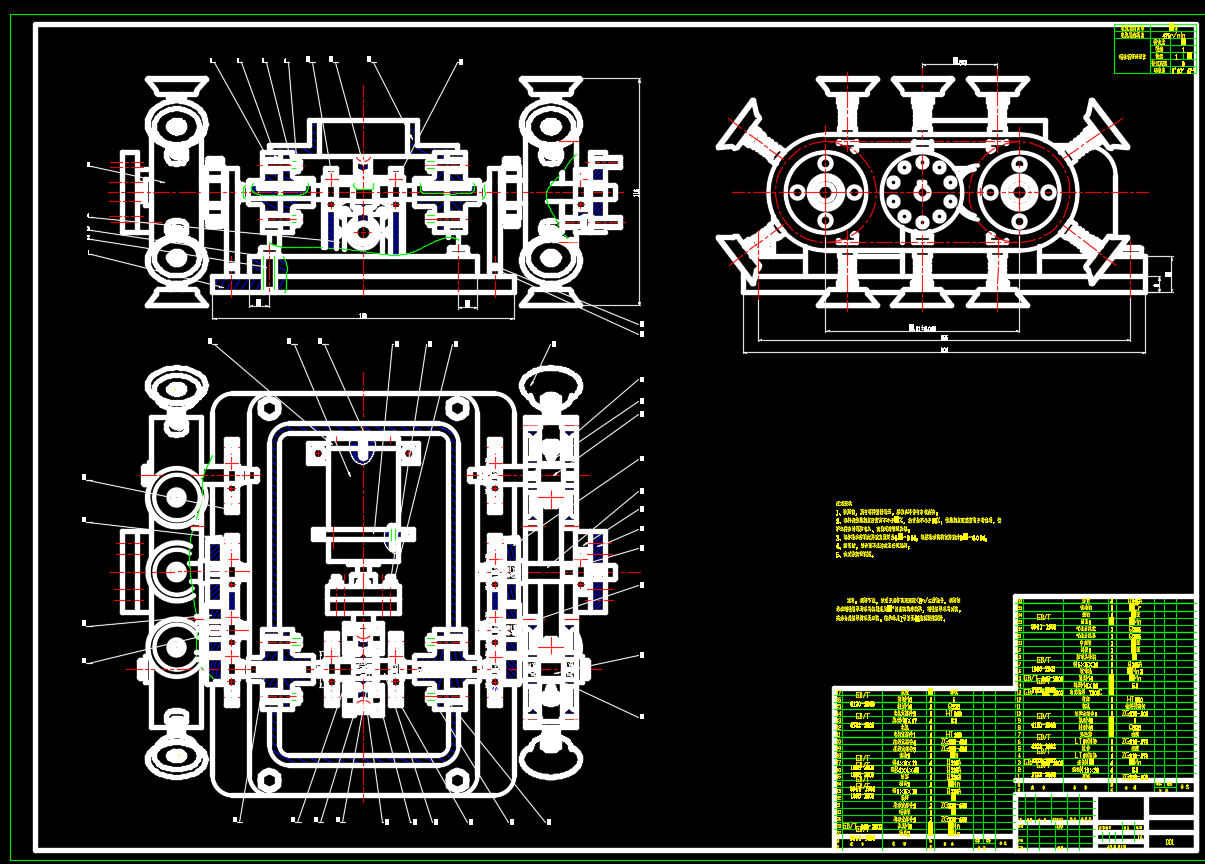
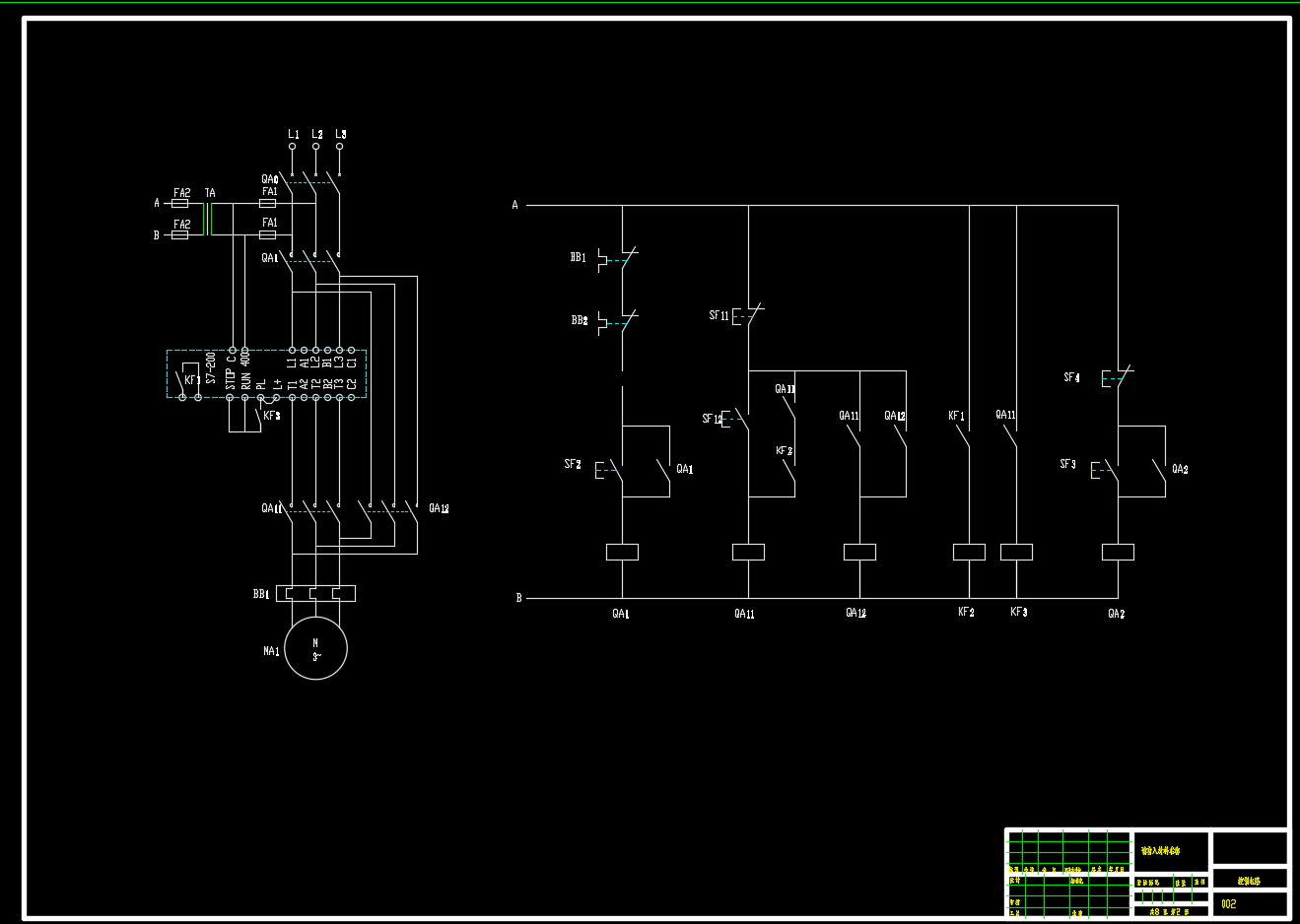
履带式吸附爬壁机器人设计与壁式清洗清洁机器人机械手的设计说明书及CAD图纸,是这类设备研发的实用资料。履带式吸附结构确保机器人在壁面稳定移动,适用于多种复杂壁面环境;配套的清洗清洁机械手则能高效完成壁面清洁作业。设计说明书详细讲解了整体方案与关键部件设计,CAD图纸提供了各组件的精确结构。这些资料可帮助理解设备工作原理,为装配调试提供直观指导,显著缩短研发周期,减少不必要的重复劳动。您所看到的图片均取自配套资源包,旨在为您提供直观、全面的内容概览,方便正式使用前进行了解和评估。请注意,资源包内的专业资料需在对应软件环境中打开,方可完整浏览、编辑或进一步使用。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
用于运输机展开式二级圆柱齿轮减速器设计【说明书+3张CAD图纸】
02/05
48
PE1200*1500复摆颚式破碎机设计总装及全套CAD图纸
01/14
69
3吨电动葫芦毕业设计(论文+CAD图纸)
02/09
54
乳化液泵的设计(论文+DWG图纸)
01/10
74
轮胎拆装机设计【轮胎拆卸扒胎机】含设计说明书、cad图纸、CAXA图纸、开题报告、任务书、外文翻译、实习报告
03/12
40
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn