收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
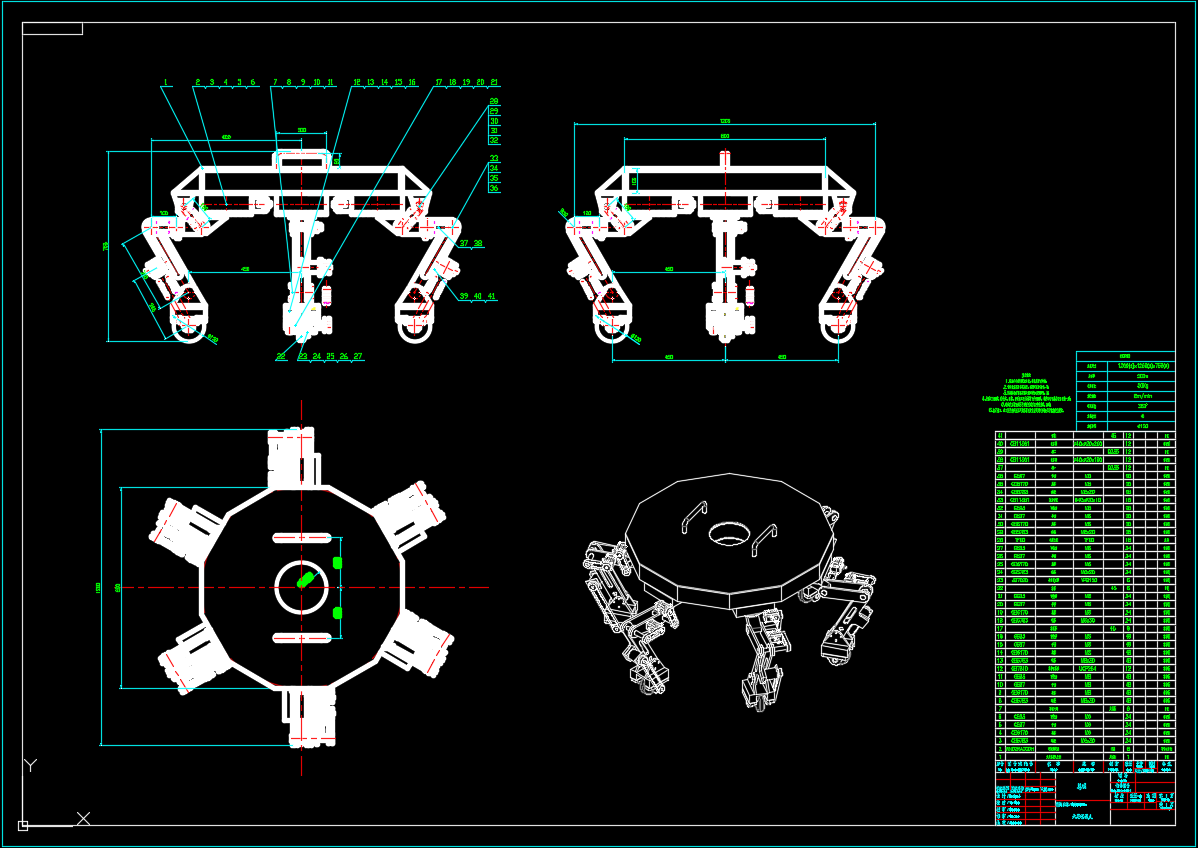
六足机器人整改
来源: 阅读:69
网站管理员
发布于 2026-01-07 23:59
查看主页
六足机器人整改聚焦提升运动性能与环境适应性,通过优化腿部结构布局,减少部件间的不必要干涉,让行走更平稳;同步调整步态规划逻辑,增强复杂地面的通过能力。配套的实用资料里有详细的整改思路和调整案例,方便直观了解整体方案。您所看到的图片均取自配套资源包,旨在为您提供直观、全面的内容概览,方便正式使用前进行了解和评估。请注意,资源包内的专业资料需在对应软件环境中打开,方可完整浏览、编辑或进一步使用。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
城市垃圾压榨机液压系统设计(说明书+CAD图纸+CAXA工程图+原理图+外文翻译)
04/09
28
四足爬行机器人SolidWorks三维
01/25
53
工艺夹具-269填料箱盖(论文+CAD图纸+工艺卡+三维图)
02/02
71
油菜排种器(论文+CAD+SolidWorks+step+x_t)
04/03
46
某机械工厂变电所全套图 CAD图纸
02/13
59
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn