收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
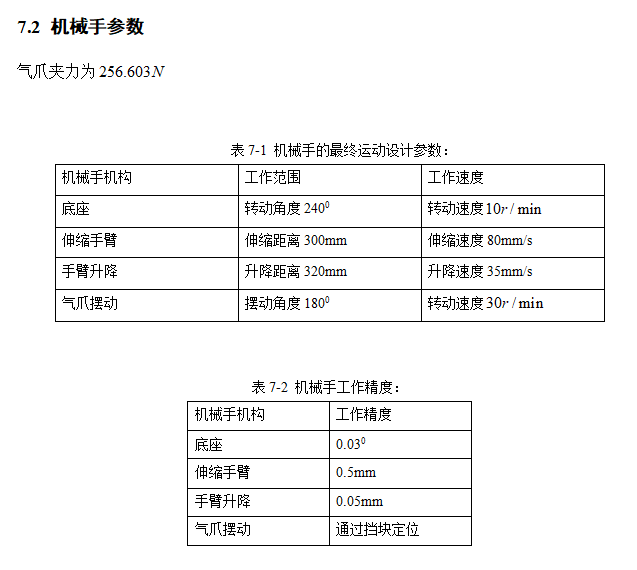
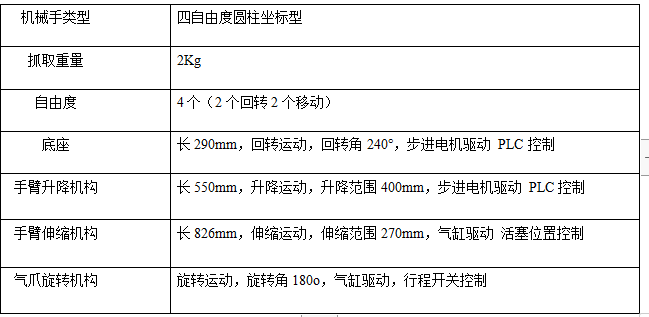
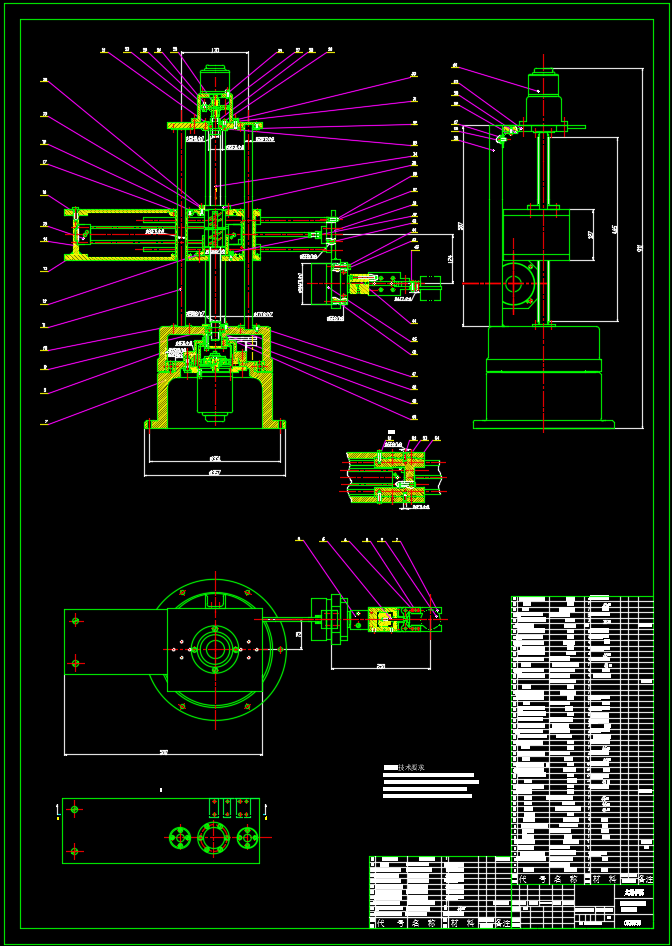
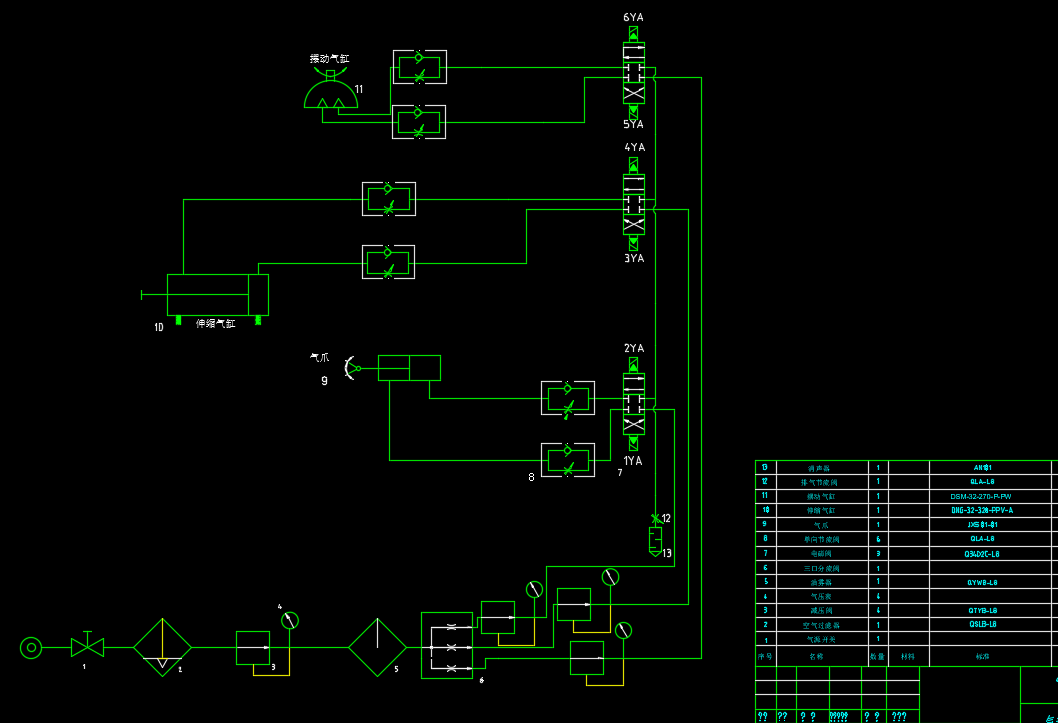
四自由度棒料搬运机械手设计(论文 CAD图纸 开题报告 任务书 外文翻译……)
来源: 阅读:70
网站管理员
发布于 2026-01-02 16:59
查看主页
四自由度棒料搬运机械手设计,核心在于实现棒料的精准抓取、稳定搬运与定位,优化作业流程,减轻人工负担。配套的学习资料包含设计论文、CAD图纸、开题报告、任务书及外文翻译等,为设计过程提供思路参考与细节支撑。您所看到的图片均取自配套资源包,旨在为您提供直观、全面的内容概览,方便正式使用前进行了解和评估。请注意,资源包内的实用资料需在对应软件环境中打开,方可完整浏览、编辑或进一步使用。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
西红柿采摘机器人设计【设计说明书+CAD图纸(标注完整)+CAD草图(标注或者标题不齐全,如果需要这里面的图纸,请自行补齐)+SW三维模型+通用三维格式】
02/05
67
CA6140车床的拨叉831003设计
02/07
66
鼠标外壳注射模设计(论文+CAD图纸+开题报告+任务书+翻译)
01/29
65
毕业设计_托板加工工艺及典型工序夹具设计(论文+CAD图纸+开题报告+工艺卡+工艺过程卡)
01/27
75
拔叉84009夹具设计与工序设计(说明书+CAD图纸+工序卡)
01/28
55
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn