收录软文
返回首页
会员中心
功能菜单
联系我们
https://web.sjbb168.com/
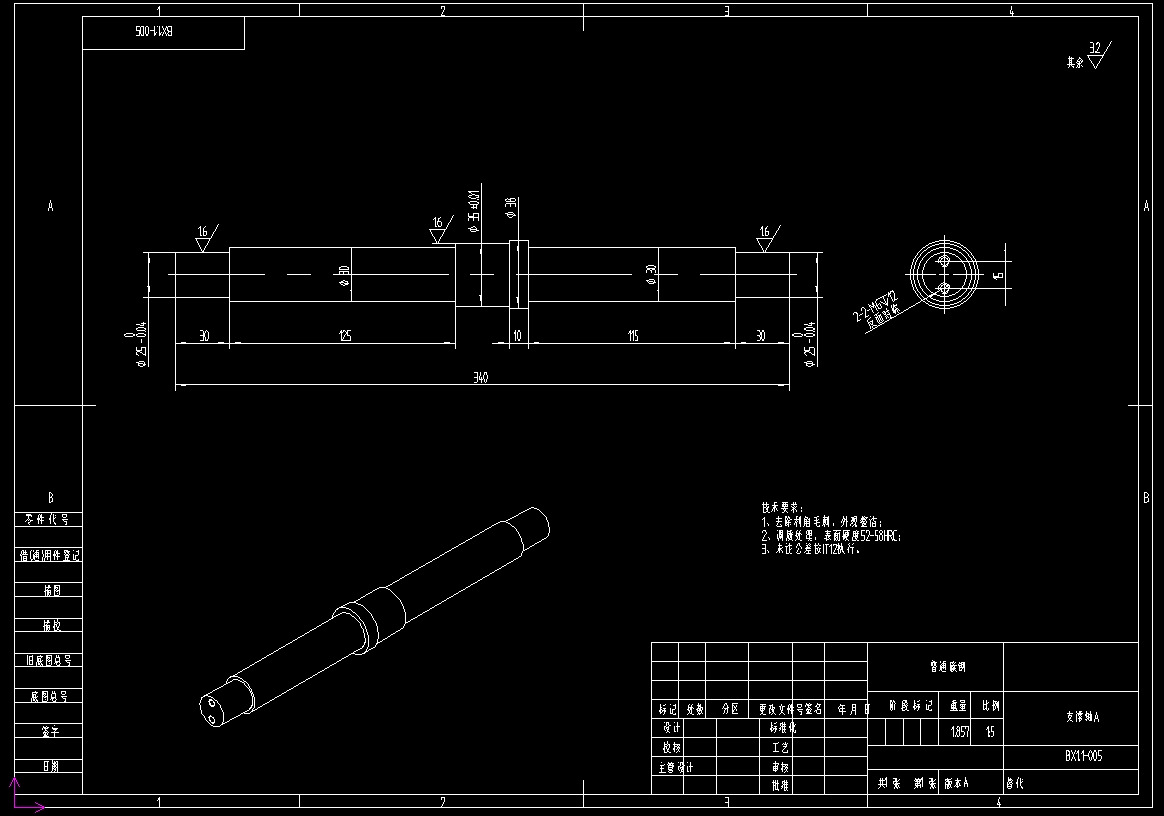
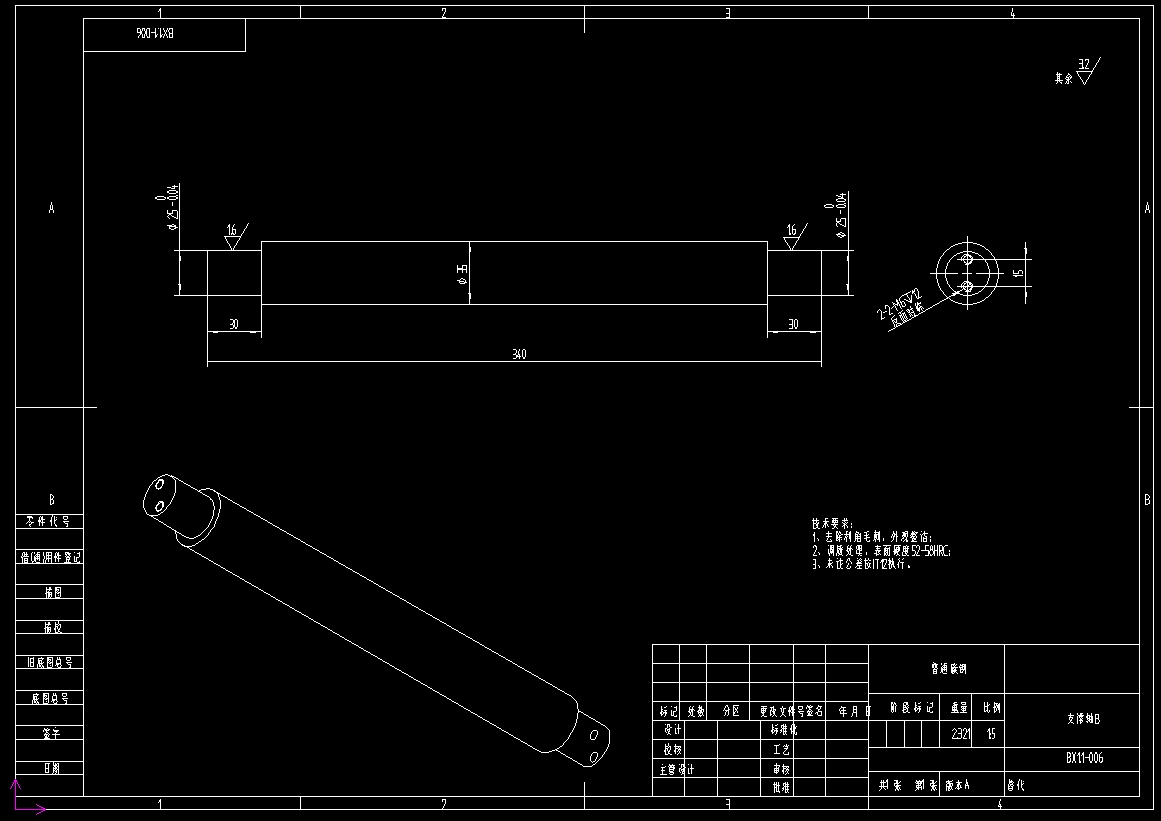
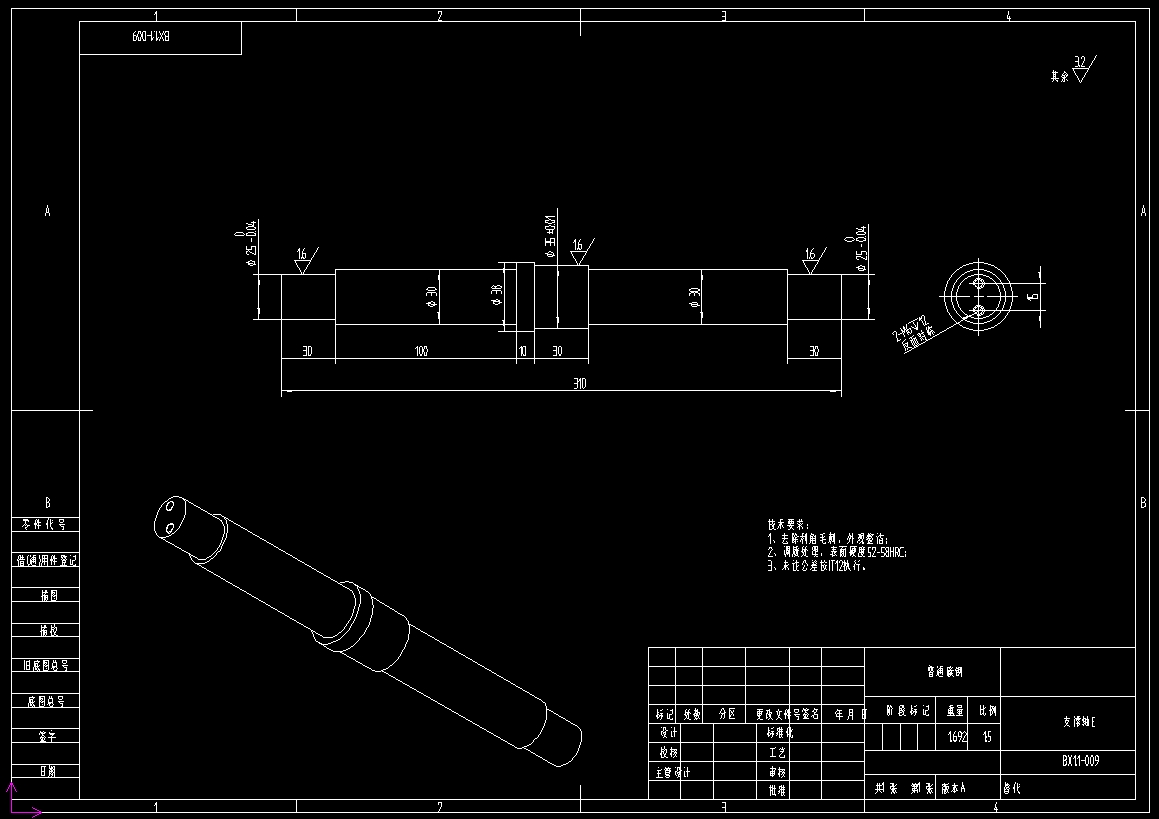
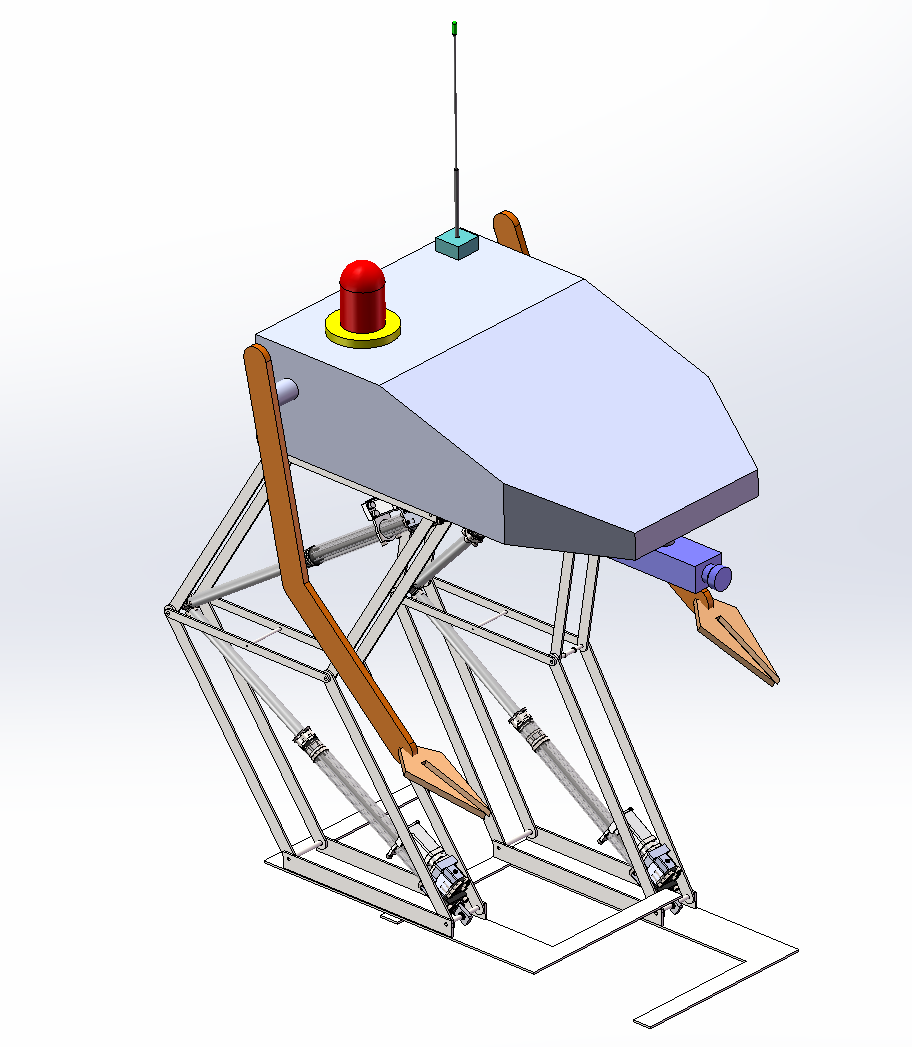
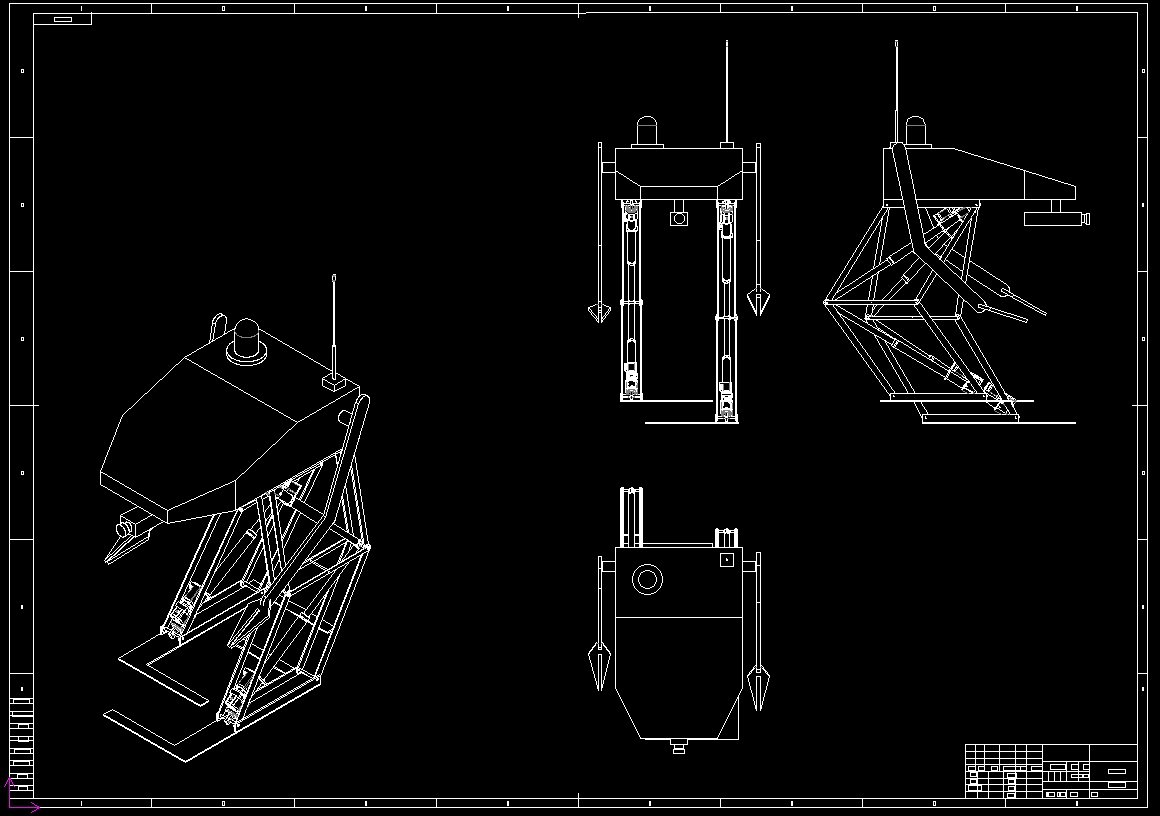
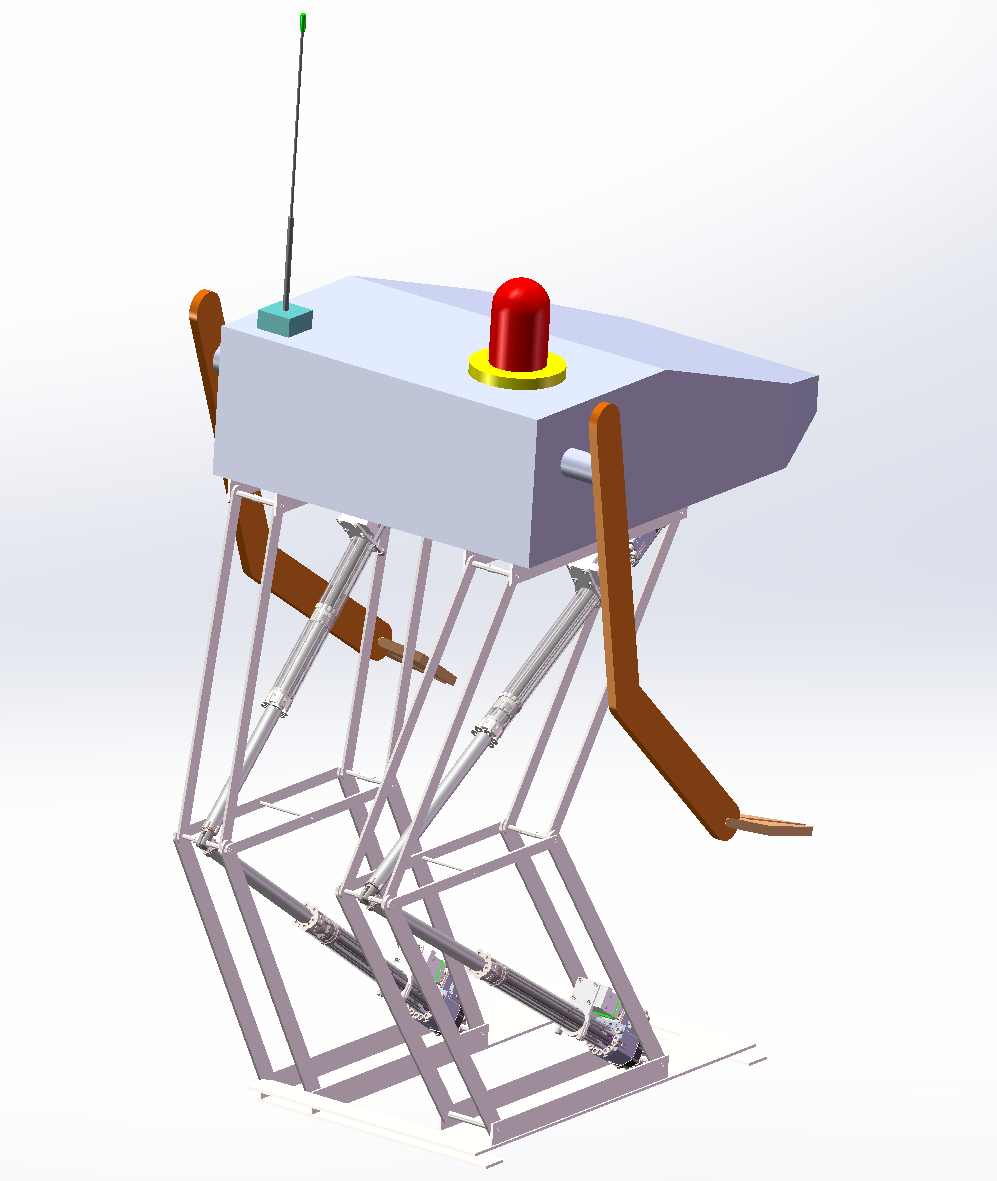
平行四边形双足步行机器人的设计与研究【三维solidworls+CAD图纸+毕业论文+运动仿真视频】
来源: 阅读:63
网站管理员
发布于 2025-12-29 09:00
查看主页
围绕平行四边形双足步行机器人设计研究,这里提供三维模型、CAD图纸、研究文档及动态演示。其核心结构采用平行四边形连杆设计,能有效提升步行平稳性,简化腿部驱动系统。配套的三维模型可直观展示整体构造与零件配合关系,CAD图纸提供详细的零件尺寸与装配关系,研究文档系统梳理设计思路与技术要点。通过这些实用资料,可辅助理解双足机器人的机构设计原理,优化研发流程,显著缩短设计周期。您所看到的图片均取自配套资源包,旨在提供直观的内容概览,方便正式使用前进行了解和评估。资源包内的学习资料需在对应软件环境中打开,方可完整浏览、编辑或进一步使用。
免责声明:本文为用户发表,不代表网站立场,仅供参考,不构成引导等用途。
收录软文
相关推荐
跨度24米,长度60米混凝土厂房毕业设计(含计算书、部分建筑、结构图)
01/26
63
“填料箱盖”零件的工艺规程及钻孔夹具设计(论文+图纸+实习报告)
01/28
53
攻丝组合机床设计修改后
03/28
46
5614.96平米,六层高校办公楼(含计算书,建筑、结构图)——山东
02/01
67
液压与气压传动课程设计——卧式单面多轴钻孔组合机床动力滑台液压系统设计【说明书+液压缸系统装配图+液压原理图】
03/13
52
首页
分类
购物车
消息
我的
想要更低价购买?
长按二维码,联系客服享优惠折扣
微信号:
yj99cn